

Haozhi Qi
@HaozhiQ
Followers
1,836
Following
665
Media
40
Statuses
211
Ph.D. Student at UC Berkeley
Berkeley, CA
Joined February 2019
Don't wanna be here?
Send us removal request.
Explore trending content on Musk Viewer
THE LOYAL PIN THAI GL NO1
• 1123238 Tweets
Djokovic
• 518279 Tweets
England
• 364020 Tweets
Rotherham
• 220305 Tweets
Noah Lyles
• 204573 Tweets
#BBNaija
• 184804 Tweets
ヒロアカ
• 148968 Tweets
Polônia
• 116826 Tweets
NBA Twitter
• 94073 Tweets
World Champion
• 77180 Tweets
Gabi
• 67971 Tweets
フワちゃん
• 57271 Tweets
堀越先生
• 55825 Tweets
Thompson
• 48644 Tweets
Carol
• 46052 Tweets
Rosamaria
• 41134 Tweets
Evandro
• 36509 Tweets
Jamaica
• 35359 Tweets
Bolt
• 30604 Tweets
GABRIELA
• 29756 Tweets
Omanyala
• 29465 Tweets
Peillat
• 28361 Tweets
Seville
• 26779 Tweets
#VoleiNoSporTV
• 26383 Tweets
thaisa
• 24456 Tweets
38x36
• 22032 Tweets
Simbine
• 20581 Tweets
Kerley
• 16242 Tweets
Greggs
• 16011 Tweets
Solari
• 13383 Tweets
Nyeme
• 13059 Tweets
#النصر_غرناطه
• 12937 Tweets
#VoleiNaGlobo
• 12864 Tweets
Peñarol
• 11408 Tweets
Tami
• 11032 Tweets

















Pinned Tweet

When I started my first project on in-hand manipulation, I thought it would be super cool but also quite challenging to make my robot hands spin pens. After almost 2.5 years of effort in this line of research, we have finally succeeded in making our robot hand "spin pens."
21
80
505
💡We release Hora: a single policy capable of rotating diverse objects 🎾🥝🧊🍋🍊⌛🥑🍅🍐🍑 with a dexterous robot hand.
No cameras. No touch sensors. Hora is trained entirely in simulation and directly deployed in the real world.
see
#CoRL
@corl_conf
1/
7
68
312
Introducing tactile skin sim-to-real for dexterous in-hand translation!
We propose a simulation model for ReSkin, a magnetic tactile sensing skin. It can simulate ternary shear and binary normal forces.
More:
1
45
183
maybe overly intelligent:
"Breakthrough in tactile sensing" -- still can't feel
Shame

1
16
127
If you are at
#CoRL2022
, come to check our poster at the Poster Lobby 352 (4:45 pm - 6:00 pm).
See how our multi-finger robot hand rotates an orange peel.
@corl_conf
Website:
Code:
3
13
95
Getting rich object representation from vision/touch/proprioception stream, like how we human perceive objects in-hand.
🎺Webiste:
➡️Led by
@Suddhus
.

Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation
paper page:
Neural perception with vision and touch yields robust tracking and reconstruction of novel objects for in-hand manipulation.
3
37
174
0
8
68
Had an amazing time at the robot learning workshop
#NeurIPS2023
! Thanks for the organizers (especially🤝
@shahdhruv_
) for such a great event!
I was also thrilled to receive the outstanding demo reward. Related Projects are: and .


Afficianados of robot learning: join us in Hall B2 at
#NeurIPS2023
for some cutting-edge talks, posters, a spicy debate, and live robot demos!
The robots are here, are you?
We also have some GPUs for a "Spicy Question of the Day Prize" 🌶️, don't miss out
0
6
42
0
1
53
We are excited to share our new work "Region Proposal Interaction Networks" on predicting long-term future trajectories from visual input. Our method can be trained in both complex simulated environments and real-world YouTube Videos.
(1/5)
1
5
47
We are organizing a workshop on touch processing
@NeurIPSConf
2023!
If you want to learn about the current status of future applications of touch processing, join us on Dec 15th at Room 214!
Don't miss our amazing lineup of speakers! For more info:

1
7
41
Our work on learning visual dynamics is accepted by
#ICLR2021
. We obtained state-of-the-art results on multiple prediction tasks as well as the
#PHYRE
physical reasoning benchmark.
Check our latest results at
We are excited to share our new work "Region Proposal Interaction Networks" on predicting long-term future trajectories from visual input. Our method can be trained in both complex simulated environments and real-world YouTube Videos.
(1/5)
1
5
47
0
5
40
🎺 As interest in human-like robotics continues to surge, we are excited to announce the “2nd Workshop on Dexterous Manipulation” at RSS 2024.
Join us to hear from an incredible lineup of speakers! And don’t miss the opportunity to submit your work and participate!

2
8
38
We’ve been thinking about this for a while: how to simulate diverse objects in a singular, abstract form? We show one example with generalization to an assortment of 🫙.
Time to give two hands to your favorite
#humanoid
! Twisting lids (off) is our first step, and more to come!

Achieving bimanual dexterity with RL + Sim2Real!
TLDR - We train two robot hands to twist bottle lids using deep RL followed by sim-to-real. A single policy trained with simple simulated bottles can generalize to drastically different real-world objects.
5
59
217
0
5
31
always excited to visit japan. i will be at ICRA next week and happy to connect and chat about robotics!

0
1
33
truly creative haha

『すずめの戸締まり』に登場する3本脚の椅子を再現したロボット設計,強化学習による歩容生成の論文を公開しました!
来週アメリカで開催されるRoboSoft2024にて発表します!
website -
#すずめの戸締まり
32
4K
15K
0
3
32
Check out our new bi-dex-hands.
To me, it is quite a fun experience to move away from my comfort zone of sim-to-real, and learn about how to collect data. I was very bad at playing video games (teleop), but with this, even I can collect the steak training data in about 3 hours.
Imitation learning works™ – but you need good data 🥹 How to get high-quality visuotactile demos from a bimanual robot with multifingered hands, and learn smooth policies?
Check our new work “Learning Visuotactile Skills with Two Multifingered Hands”! 🙌
7
75
281
1
6
28
Really enjoyed all the talks, spotlights, and panel discussion of our 1st touch processing workshop! A lot of fun and inspiring discussion! Thank you to everyone who contributed to making it a success! 🙌


We are organizing a workshop on touch processing
@NeurIPSConf
2023!
If you want to learn about the current status of future applications of touch processing, join us on Dec 15th at Room 214!
Don't miss our amazing lineup of speakers! For more info:
1
7
41
1
1
24
so cute 😀 congrats to the team!!

I have been cleaning my daughter's mess for more than two years now. Last weekend our robot came to home to do the job for me. 🤖
Our new work on visual whole-body control learns a policy to coordinate the robot legs and arms for mobile manipulation. See
23
116
653
0
3
21
📢 RSS 2024 Dexterous Manipulation workshop.
Deadline extended to: June 14th (this Friday)! Don't miss this opportunity to share your exciting work.
Submit your contribution here:

🎺 As interest in human-like robotics continues to surge, we are excited to announce the “2nd Workshop on Dexterous Manipulation” at RSS 2024.
Join us to hear from an incredible lineup of speakers! And don’t miss the opportunity to submit your work and participate!
2
8
38
0
7
21
Recordings available at (also on our website). Check them out for the great invited talks and spotlights.


Excited for our stellar lineup of speakers at the Dexterous Manipulation workshop this Monday! 🎙️ Can't make it? We've got you covered with a live stream. 📺 Don't miss out!
Live-stream:

2
9
43
1
4
19
Heading to New Zealand for
@corl_conf
! It has been 4 years since my last international travel!
And ... this is the first time I'm travelling with a robot!
We will present our poster on Friday, Dec 16, 4:45PM-6:00PM, with the help of a robot 🤖. Check out the summary thread:

💡We release Hora: a single policy capable of rotating diverse objects 🎾🥝🧊🍋🍊⌛🥑🍅🍐🍑 with a dexterous robot hand.
No cameras. No touch sensors. Hora is trained entirely in simulation and directly deployed in the real world.
see
#CoRL
@corl_conf
1/
7
68
312
0
0
17
Amazing!

Interested in making your bipedal robots to be athletes? We summarized our RL work to create robust & adaptive controllers for general bipedal skills. 400m-dash, running over terrains/against perturbations, targeted jumping, compliant walking, not a problem for bipeds now.🧵👇
15
90
447
0
2
16
Checkout
@carohiguerarias
’s work on estimating object-environment contact using tactile sensing, and how it benefits downstream manipulation.
And if you want to simulate touch sensing in isaacgym, make sure you also check our code!

🤔Are extrinsic contacts useful for manipulation policies?
Neural Contact Fields estimate extrinsic contacts from touch. However, its utility in real-world tasks remains unknown.
We improve NCF to enable sim-to-real transfer and use it to train policies for insertion tasks.
2
6
50
0
3
15
videos available now!
We are organizing a workshop on touch processing
@NeurIPSConf
2023!
If you want to learn about the current status of future applications of touch processing, join us on Dec 15th at Room 214!
Don't miss our amazing lineup of speakers! For more info:
1
7
41
0
3
15
very nice work! capturing scene geometry using (vision and) touch. Also with correspondence!

NeRF captures visual scenes in 3D👀. Can we capture their touch signals🖐️, too?
In our
#CVPR2024
paper Tactile-Augmented Radiance Fields (TaRF), we estimate both visual and tactile signals for a given 3D position within a scene.
Website:
arXiv:
9
23
116
3
1
14
📢 Announcing 1st "Workshop on Touch Processing: a new Sensing Modality for AI" at NeurIPS 2023. If you are interested in touch sensing & machine learning, don’t miss the opportunity to submit your work and participate! 📷 Call for Papers: .
#NeurIPS2023
1
5
14
Great work! Exciting time for sim2real transfer!

How to chain multiple dexterous skills to tackle complex long-horizon manipulation tasks?
Imagine retrieving a LEGO block from a pile, rotating it in-hand, and inserting it at the desired location to build a structure.
Introducing our new work - Sequential Dexterity 🧵👇
26
91
471
1
2
12
Unitree's progress is incredible! One of the hardest robot learning task I saw recently.

Unitree H1 The World's First Full-size Motor Drive Humanoid Robot Flips on Ground.
Unitree H1 Deep Reinforcement Learning In-place Flipping !
#Unitree
#UnitreeRobotics
#AI
#Robotics
#Humanoidrobots
#Worldrecord
#Flips
#EmbodiedAI
#ArtificialIntelligence
#Technology
#Innovation
68
412
2K
0
0
11
Great opportunity for incoming PhD students!

Excited to share that I'll join UPenn as an Assistant Professor next fall! I couldn't be more grateful to all the mentors and collaborators for their support along the way!
I'm looking for motivated students👩🎓to join my lab! If you love robots 🤖 and learning, look no further!

29
27
422
0
0
12
Excited to share our new work with
@xiaolonw
, Chong You, Yi Ma, and Jitendra Malik
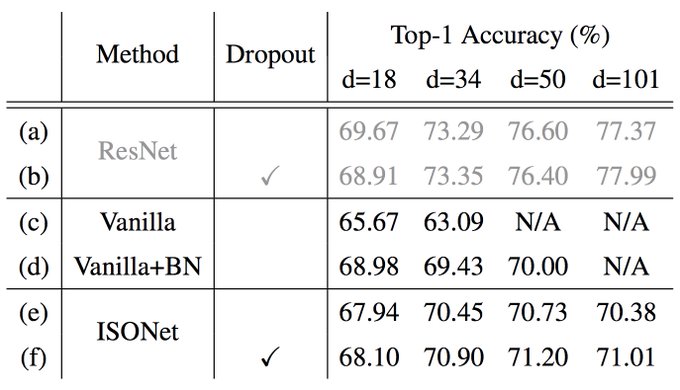
How to train very deep ConvNets without residual blocks? Our ICML paper on Deep Isometric Learning successfully trains 100-layer ConvNets without any shortcut connections nor normalization layers (BN/GN) on ImageNet.
Paper:
Code:
4
37
182
1
3
10
When I first saw the video, I was quite impressed by the complexity of the task and the efficiency of the data collection. It definitely reshapes my opinion on robot data collection!
Checkout the new paper and fully open-sourced system by
@chenwang_j
and team!
Can we use wearable devices to collect robot data without actual robots?
Yes! With a pair of gloves🧤!
Introducing DexCap, a portable hand motion capture system that collects 3D data (point cloud + finger motion) for training robots with dexterous hands
Everything open-sourced
21
134
622
1
0
10
very insightful thread!
0
1
7
We achieve this by first training an oracle policy with ground-truth object physical and shape info, then learn another policy with realistic sensory input (all in sim).
The object training set covers a large variety of objects, making the policy adaptive and generalizable.


1
0
7
very cool 🤖!!
Let’s think about humanoid robots outside carrying the box. How about having the humanoid come out the door, interact with humans, and even dance?
Introducing Expressive Whole-Body Control for Humanoid Robots:
See how our robot performs rich, diverse,
94
209
1K
0
1
7
🚀 Deadline Extended to Oct 2nd for our touch processing workshop at NeurIPS 2023!
We encourage relevant works at all stages of maturity, ranging from initial exploratory results to polished full papers!
Also don't miss our amazing lineup of speakers!

📢 Announcing 1st "Workshop on Touch Processing: a new Sensing Modality for AI" at NeurIPS 2023. If you are interested in touch sensing & machine learning, don’t miss the opportunity to submit your work and participate! 📷 Call for Papers: .
#NeurIPS2023
1
5
14
0
1
7
Thanks to the amazing speakers: Katherine J. Kuchenbecker, Chiara Bartolozzi,
@jiajunwu_cs
, Satoshi Funabashi, Ted Adelson,
@nathanlepora
, Jeremy Fishel, and Veronica Santos; and my co-organizers
@RCalandra
,
@perla_maiolino
, Mike Lambeta, Yasemin Bekiroğlu, and
@JitendraMalikCV
.
0
0
3
We represent each object by its intrinsic properties (position, scale, mass, etc.) and train an adaptive RL policy with all of them!
Then, to deploy it to the real-world, we train an adapatation module to estimate them online from proprioceptive history.
3/

1
2
6
The robot hand can sense the discrepancy between its command and the actual state history, and use this signal to estimate the relative object sizes and weights during deployment.
We show how the estimation changes when we remove the old object & place a new one.
4/
1
2
6
To bridge sim-to-real gap, we use object depth as the vision input. It's easy to simulate, easy to get in the real-world (thanks Segment-Anything).

2
0
6
From a stable grasp, our policy can rotate objects of different weights (from 5g to 200g), sizes (from 4.5 cm to 8cm), different shapes (spheres, cubes, and one with holes), small coefficients of friction (ice ball), different center of mass (an hourglass and a bottle).
2/

1
2
6
Thanks a lot
@stokel
for writing this!

My latest for
@newscientist
is on this cool robotic hand which has the dexterity to handle tiny, irregular-shaped objects in a way I've never seen before
1
0
3
0
0
5
to correct my previous tweet: I receieved an email saying one paper I was reviewing for
#NeurIPS2022
is desk rejected by PC. That is [2 days] before the review deadline. I guess many reviewers finished/drafted their reviews and thus part of our time is wasted.😀
1
1
4
Such an ability enables our policy to apply the “just-right” force during manipulation so that it won't destroy slightly soft objects (such as a shuttlecock) during operation. This figure shows the correlation between the average commanded torque and the object's mass.
5/

1
2
5
Really Cool!!! Now I’ll ask for Vision Pro for research!


🤖Introducing 📺𝗢𝗽𝗲𝗻-𝗧𝗲𝗹𝗲𝗩𝗶𝘀𝗶𝗼𝗻: a web-based teleoperation software!

🌐Open source, cross-platform (VisionPro & Quest) with real-time stereo vision feedback.

🕹️Easy-to-use hand, wrist, head pose streaming.
Code:
14
91
378
0
0
5
We also show what is learned in the feature space, so we try to decode that using a shape prediction task. We found 1) the oracle policy preserve the shape info, even when the only supervision is a scalar reward; 2) The visuotactile policy can also learn to infer that.

1
0
5
Feel free to open an issue, email me, or join the Discord channel for further discussions.
arxiv:
work done with:
@ashishkr9311
,
@RCalandra
,
@YiMaTweets
, and Jitendra Malik

0
1
5
For touch, we represent vision-based touch sensing as discretized 2D contact locations, to make it easy to simulate.
1
0
5
A good simulation environment is necessary for a good policy. The environment should provide enough variety to enable generalization in the real world. We find that cylinders with different aspect ratios encourage a generalizable gait to emerge while using spheres does not.
6/
1
2
5
The robots are so cute! Looking forward to trying out!

Humanoids 🤖 will do anything humans can do. But are state-of-the-art algorithms up to the challenge?
Introducing HumanoidBench, the first-of-its-kind simulated humanoid benchmark with 27 distinct whole-body tasks requiring intricate long-horizon planning and coordination.
🧵👇
8
91
333
1
0
5
We show different quantitative results on the benefits of using vision and touch: 1) they improve performance especially on challenging objects; 2) they improve out-of-distribution generalization; 3) With the help of vision and touch, it can almost match oracle policy.



1
0
5
very interesting task! robot dogs also need to exercise 😀

Introducing DrEureka🎓, our latest effort pushing the frontier of robot learning using LLMs!
DrEureka uses LLMs to automatically design reward functions and tune physics parameters to enable sim-to-real robot learning. DrEureka can propose effective sim-to-real configurations
24
118
601
0
0
5
w/
@brenthyi
,
@Suddhus
, Mike Lambeta,
@YiMaTweets
,
@RCalandra
,
@JitendraMalikCV
.
@berkeley_ai
and
@MetaAI
2
0
4
How can we build even easier and more accessible teleoperation? I think maybe it’s a good idea to revisit grasp taxonomy.
“Mastering teleoperation requires rethinking grasp taxonomy” [pun intended].

0
1
4
Cool sim-to-real results! The lightbulb example is quite impressive!

Does your sim2real robot falter at critical moments 🤯? Want to help but unsure how, all you can do is reward tuning in sim 😮💨?
Introduce 𝐓𝐑𝐀𝐍𝐒𝐈𝐂 for manipulation sim2real. Robots learned in sim can accomplish complex tasks in real, such as furniture assembly.
🤿🧵
16
46
186
1
2
4
wow
🐉🥎

0
1
4
cool work on using sim data to achieve in-the-wild generalization!

How to make your robot handle diverse visual scenarios?🤔
Introduce our recent work: Learning to 𝑴𝒂𝒏𝒊pulate Any𝒘𝒉𝒆𝒓𝒆: 𝐌𝐚𝐧𝐢𝐰𝐡𝐞𝐫𝐞. It enables your robot to manage multiple visual disturbance types 🌈and step out of simulation to achieve sim2real transfer.🤖
9
52
238
1
0
4
Should we not desk reject paper after review process started to prevent such a thing?
1
1
3
Lead by amazing Jessica Yin and collaborate with
@JitendraMalikCV
,
@LabPikul
, Mark Yim,
@t_hellebrekers
Thanks the support from
@AIatMeta
,
@GRASPlab
,
@berkeley_ai
, and
@UWMadEngr
Website:
Paper:

0
0
4
@dhanushisrad
still working on that. We decide to first extend the axes set, then extend object set.
0
0
3
Congrats!
@Jiayuan_Gu

Instead of just telling robots “what to do”, can we also guide robots by telling them “how to do” tasks?
Unveiling RT-Trajectory, our new work which introduces trajectory conditioned robot policies. These coarse trajectory sketches help robots generalize to novel tasks! 🧵⬇️
3
48
253
0
0
3
Thank you
@QinYuzhe
! Your works are inspiring and helpful for our project! Looking forward to seeing more exciting advancement in this area.

Glad to see another sim2real work on dexterous hand!
When imitation learning are dominant nowadays for manipulation, sim2real are still powerful for complex dynamical system.
Congrats the authors for the great work
@ToruO_O
@zhaohengyin
@HaozhiQ
1
2
15
0
0
3
also thanks for the help from my great co-organizers
@RCalandra
,
@perla_maiolino
, Mike Lambeta,
@YsmnBekiroglu
, and
@JitendraMalikCV
.
0
0
3
We analyze our policy's performance on more than 30 objects in the real world. Our policy performs well on most regular or chubby objects. But thin, small, or objects with large aspect ratios are harder to manipulate.
7/


1
2
3
An interesting thing we find is that Tactile Policies Explore More Finger Gaits. Greater joint state exploration is potentially a factor in task success and an indicator of gait adaptation.
1
0
3
Great place if you like robot hands!
Seeking robotics wizards to join our quest! 🧙♂️🤖
Join our cutting-edge team and shape the future of dexterous robots. We're seeking brilliant minds to push the boundaries of what's possible in robot manipulation.
Link:
#Robotics
#AI
#RobotLearning
0
22
134
0
0
3
(just joking) I was reading social psychology last year. When I read "Insufficient Justification Effect", I realize that's how school decides salaries:

Salaries of PhD students and postdocs in many countries are extremely low and career prospects are very grim. How can one think of convincing the best minds to stay in research, under these conditions?
172
1K
7K
2
0
1
With this tactile information and proprioception, we can train a policy for generalizable in-hand translation. We conduct comprehensive real-world evaluations on OOD objects and different hand orientations.
1
0
2

There is still a long way to go towards general in-hand manipulation, and this field is full of challenges and opportunities! We hope our project can be a solid foundation for future research. Our code is at and I’m happy to answer any questions.
8/

1
2
2
Super excited to have Katherine J. Kuchenbecker, Chiara Bartolozzi,
@jiajunwu_cs
, Satoshi Funabashi, Ted Adelson,
@nathanlepora
, Jeremy Fishel, Veronica Santos as our speakers!
1
0
2

Three key design decisions for our tractable tactile skin model:
1) We use object point clouds to calculate intersecting collision volumes, in contrast to the typical handful of points for rigid contact.
2) Each taxel’s sensing range extends beyond its collision geometry to mimic
1
1
2
Also congrats Zilin Si, Kevin Lee Zhang,
@fzeyneptemel
,
@Oliver_Kroemer
for winning the best paper award (tilde) and
@kenny__shaw
@pathak2206
for winning the best presentation award (leap hand v2)!
0
0
2
We show such a simple method can capture inter-object and object-environment interactions over a long-range, and easily generalize to new environments. In addition, we show our task-agnostic prediction model can be applied to planning tasks and achieves large improvements.
(5/5)

0
0
2
cool work! very fast progress.

Introduce OmniH2O, a learning-based system for whole-body humanoid teleop and autonomy:
🦾Robust loco-mani policy
🦸Universal teleop interface: VR, verbal, RGB
🧠Autonomy via
@chatgpt4o
or imitation
🔗Release the first whole-body humanoid dataset
19
68
385
1
0
2
It states that people are more likely to engage in a behavior that contradicts their personally held beliefs when they are offered a smaller reward, in comparison to a larger reward.
0
0
1
@whoisvaibhav
Human hand is so great. Hardware is not so good. But we’ll ping you when we get closer.
1
0
2
Also thanks for my amazing co-organizers:
@taochenshh
@QinYuzhe
@dngxngxng3
@contactrika
@asmorgan24
@xiaolonw
@pulkitology
0
0
1
We propose to utilize this idea to build rich object representations for trajectory prediction. Instead of predicting pixels, we argue that trajectory prediction is the key to reduce complexity in long-term prediction, and more feasible for downstream tasks like planning. (4/5)
1
0
1

@FahadAlkhater9
@ashishkr9311
@UCBerkeley
@Tesla
@Teslasbot
thank you! we also have a summary post here in case you are interesetd
💡We release Hora: a single policy capable of rotating diverse objects 🎾🥝🧊🍋🍊⌛🥑🍅🍐🍑 with a dexterous robot hand.
No cameras. No touch sensors. Hora is trained entirely in simulation and directly deployed in the real world.
see
#CoRL
@corl_conf
1/
7
68
312
1
0
1
As someone previously worked on object detection, I'm quite surprised the region feature pooling idea is so under-explored in the filed of intuitive physics and dynamics prediction. Our work tries to bridge the success in computer vision to the intuitive physics community. (3/5)

1
0
1