

Ian Pritchard (anthro/acc)
@Fennex628
Followers
1,676
Following
582
Media
180
Statuses
1,882
Cofounder @anthrobo . Humanoid robotics developer since 2015 with @P87_robotics . Electronics engineering technologist and nanotechnologist from @NAIT .
Alberta, Canada
Joined October 2019
Don't wanna be here?
Send us removal request.
Explore trending content on Musk Viewer
I VOTE
• 574808 Tweets
#2024MAMAVOTE
• 508886 Tweets
गोपाल मिश्रा
• 125435 Tweets
Libya
• 100257 Tweets
Nobel
• 98975 Tweets
LOVE MONEY FAME OUT NOW
• 70456 Tweets
Artist of the Year
• 70215 Tweets
Super Eagles
• 59351 Tweets
神奈川県警
• 54952 Tweets
アトラス彗星
• 47396 Tweets
Choice - Female Award
• 44799 Tweets
#njkopw
• 44751 Tweets
BOOKEXPO X OHMLENG
• 37161 Tweets
#tomorrowxtogether
• 35083 Tweets
#スポ男
• 32054 Tweets
Daron Acemoğlu
• 27814 Tweets
レモンポップ
• 25062 Tweets
千葉県北西部
• 24519 Tweets
地震速報
• 22804 Tweets
棚橋引退
• 18069 Tweets
棚橋弘至
• 14861 Tweets
ペプチドナイル
• 12369 Tweets
ノミネート
• 10256 Tweets
Simon Johnson
• 10018 Tweets




















Pinned Tweet

Knee flexion and extension using our cycloidal drives.
Leg demo IRL this week.
@POINTBLANK_LLC
3
10
173
For a solid, adaptable set of humanoid robot legs, good actuators are required. That's what I'm working on during s5
@_nightsweekends
. I've open-sourced the design for you to build an actuator for yourself! Maybe you can use it in a project of your own.
@_buildspace
@FarzaTV
14
49
443
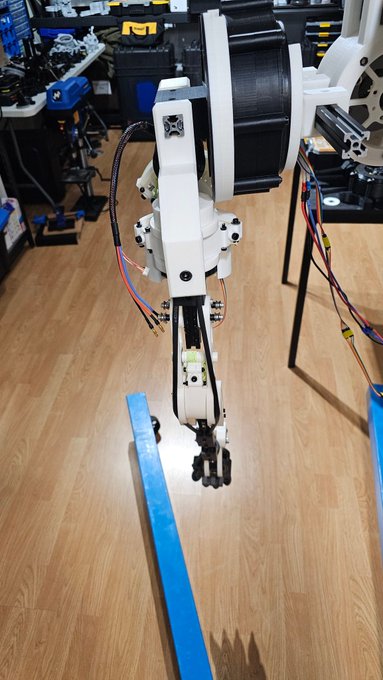
Leg assembled. This weekend, I will switch from a linkage to a wide belt to drive the knee from an actuator located in the hip.
Thanks to
@_mattfreed
for the idea of using belt drives for the legs. It'll be so much easier, especially for simulation down the road.


19
35
381
Just finishing up the last parts of the assembly & usage guide for the WOLF actuator [V1]. Releasing it tomorrow morning (PDF format) on GitHub!

6
19
330
Motion works as planned. Now to run the cables to a motor and tension them... and add lubrication!
5
6
183
Assembly time: Prototype leg with capstan actuators.


5
10
182
Cycloidal drive is working. Lubricant is still needed.
6
8
166
It's time to attach the rest of the actuators.

4
9
145
Update: Kevlar kiteline works fine 👍
5
10
141
Assembled the capstan drive prototype. I just used printed bushings in place of the large bearings for the big drum because it'll be modified for use with 6810 bearings later.


5
11
132
WOLF V1.1 weight: 1.55 Kg
WOLF V1.0 weight: 1.37 Kg
A difference of 185 g, with the improvements of modularity, ease of maintenance, and better bearings!


2
3
128
I'm looking for affordable, low-speed, high-torque brushless motors. We're building a soft, compliant, and lightweight musculoskeletal humanoid.
So far, I found some from Cubemars.
Are there any other suggestions for direct-drive torque motors that are available immediately?

16
5
121
Added the leg rotation axis (kevlar capstan). I'll finish the rest tomorrow.


2
10
115
Torque testing this week! Leg testing to follow that. 🦿

0
7
111
3D-printed OpenSCAD bearing experiments.
First one: crossed-roller bearing.
190mm OD, 120mm ID, 10mm wide. Uses 5mm rollers. All printed in PLA. Lubricated using PTFE grease ("Super-Lube").
4
9
106

Position control of WOLF with ramped velocity! ODrive tuning is coming along nicely. I'm not finished yet, but I aim to be tomorrow.
I'll work on that as the test stand for the actuator is printing.
10
2
105
Intrigued by this new QDD model from
@CubemarsS
🤔
Mounting holes, low speed, high torque, and it runs at 48V.
Paired with a nice tendon drive, I think we're onto something.

4
3
96

Day 6/7 of designing + building a cycloidal drive. Backlash has been eliminated, and torque testing begins tomorrow.
It sounds like a ghost! 👻
3
5
89
Testing the design for a cycloidal drive.
Prototype will be 3D printed for fit and function, with production models being machined out of metal.
2
3
87
I am building another cycloid with increased reduction - in the same footprint! I'm also making the entire design modular, where you simply swap an insert to change the total gear ratio.
Next up - designing the entire body to be a rugged heatsink for the motor, using 6061.

3
1
86

Installation of the gear assembly in 3 easy steps.
3
4
80
I woke up to find that these arrived 2 days early - thanks
@BambulabGlobal
!
Let's get building. 🛠🦾

7
4
79




Today, I'm adding some more bearings to improve efficiency. It has a nice hum to it!
5
1
74
We are going to try out Kevlar on this one.


3
3
74
An open-source humanoid robot that you can build at home - that's what I'm working on for S5 of
@_nightsweekends
.
I'm making it available as a DIY kit, pre-assembled units, and available for download on GitHub.
cc:
@_buildspace
and
@Anthrobo

14
10
73
WOLF Actuator V1.1 is here!
With it comes a number of improvements:
- Modular bearings
- More load mounting points
- Reduced unique part count
- Easier maintenance
Files will be updated on Thingiverse and Printables shortly.

4
8
71
Getting some gearsets ready for WOLF V1.1 ⚙️
I am aiming to release it next week. Improvements over V1.0 include:
- Modular bearings
- Stronger outer rings
- Better radial mounting options
All gearing from V1.0 is forward-compatible - no need to reprint them!

2
6
71
Belt drive connected from the knee actuator to the knee joint. Structure has been reworked for easier assembly and is much more rugged. A secondary belt and pulley will be added to allow for additional reduction and to move the belt internally to the knee. More updates this week.

4
4
69
A little bit of noise, but some PTFE grease and maybe swapping the bearings to the inside will fix that.
3
2
69
Automatic spring tensioners were a great addition 😁


2
4
68
Knee actuator mounted atop the thigh actuator.

3
3
67
Got a little test arm mounted. 🦾
I've got some different outer rings for the actuator I'll be posting this week. They'll make mounting radial loads easier with a simple 40mm profile.
All other components will remain the same.

2
1
66
RIP ODrive 😥
Perished to a ground loop. I'll take it as a sign to switch to an on-axis motor controller.
Sadly, there is no motorized demo of the leg anytime soon.

7
0
66
WOLF V1.1 torque test! 30V, 8.5A current limit on the ODrive. 60cm test arm. Peak weight measured: 8.475Kg. Peak torque: 50.85Nm! That's not too bad, and we aren't anywhere near the max rated current for our motor.
Snapping noise was the plastic on the edge of the bearings.
6
3
63
I've got the actuator holding a 10.2Kg hard case at 40cm (~40.8Nm of torque). The motor is running at 30V, 10A. Temperatures on the ODrive FETs are around 28°C, with the motor windings around 23°C. Seems stable.
4
6
63
I'm pretty happy with it so far, but it can use improvements. I'm going to strengthen the smaller drum and switch the tensioner bolts to M4. The new frame will be built into the knee housing itself.
2
5
63

Gearing up to build more cycloidal drives. I'm drafting some leg designs this week and starting on assembly this weekend.

3
0
62
Update: The WOLF Actuator Assembly and Usage Guide [V1.0] is now available on GitHub.
Please see the Feedback and Contributions section near the end if you would like to provide us with feedback.
Good luck with your builds!
1
8
61

Yes, I know, that's the dining room table! 😅
I'm currently in the process of reorganizing the lab and setting up a room for testing designs and recording videos. I'll be making a video tomorrow explaining the bearings I designed, why I chose them, and how they'll be integrated.

2
0
60
Tomorrow, I'm powering up the new WOLF and beginning tests! I'll share my ODrive config once it's stable.

4
2
58
There was a delay between when the input started to spin and the output started to spin. It was the backlash caused by not having bearings on the output pins...
Backlash eliminated.
2
1
58
Nevertheless, hooked up to the shop crane for some testing
0
4
58
I'll be posting my week 3 update for
@_nightsweekends
tomorrow. It covers some lessons learned, and what comes next. I'll make a second video covering more details too.
For now, here's a new crossed-roller bearing for the actuator! An improved one is printing tonight.
0
2
55
WOLF in the wild 👀


0
1
53
Do excuse the fan in the background - it's helping keep the ODrive cool 😎
2
4
54
First torque test of the cycloidal drive! 1.265 Kg at 80 cm. Around 10.12 Nm, with the motor pulling 30V, 5A from the ODrive. I'm setting up the new scale tomorrow for improved testing.
5
0
50
Gearing weighs 280g (incl. the planet gear alignment tool).
250g without it.

2
0
51
Drop-in replacement cycloid drives! The mounting patterns for the housing and output are now standardized to match other mainstream actuators. Testing this out next week on
@POINTBLANK_LLC
's DROPBEAR platform.

4
2
49
I'm making some quick improvements to the encoder housing. Files on GitHub will be updated today.

4
1
45
I've decided that my CAD workflow will involve only FreeCAD (for sketching and parametric design), Blender (for sculpting, and lighted-renders), and Windows 3D Builder (for simple operations). All free software that is OK for commercial use. No locked-down premium software.
8
8
46


Configuration of the hip assembly had to be changed last minute, not all according to plan 😔

0
2
44
I would like to see these in action. Very nice!


1
1
43
The OpenSCAD generator for the modular bearing has been uploaded to the GitHub repo.

0
8
43
Bro is cooking 👀🦾

First testing of newly printed finger based off the open source HRI hand. This feels extreme durable compared to the previous version. Next is to connect the linear actuator and push the mounting back into the forearm.
2
21
172
0
2
41
Great tools for working with heat-set inserts at home. Installation is a breeze now! 😀



1
0
42

First test using the hanging scale. 30 V, 20 A supplied to the motor. Scale weight of 640 g.
2.3 kg measured + 0.64 kg = 2.94 kg
90 cm test arm is used.
2.94 kg * 90 cm = 264.6 kgcm ≈ 25.94 Nm of torque.
Scale is secured to the shop crane's frame using a ratchet strap.
1
1
40
Updated results using the 100 cm test arm. Peak weight measured: 9.010 Kg. Approximately 90 Nm of torque. Getting very close to our goal of 100 Nm of torque for the 3D printed WOLF actuator.
30V, 25A delivered to the motor using the ODrive.
5
2
39
The nut ring.
Links the motor housing and main body of the cycloidal drive together.



3
2
38

It's week 5 of
@_buildspace
@_nightsweekends
, and the improved bearings are ready for the next release of the WOLF actuator. 🐺
V1.1 is releasing this week and will power the legs of the Anthro - our open-source humanoid robot.
The OpenSCAD generator launches this week. ⚙️
0
4
37


It's not too bad!
The arbor press really helps get the finish nice and smooth.

2
0
35
I've had a number of people interested in working on the Anthro project. The problem is that there was no documentation or guidelines on how to get involved.
The docs site goes live at the end of the week. There's more than just technical roles needed.
It's time to get cooking.
6
1
35
Progress on the cycloidal actuator continues. We'll be testing two models: 21:1 and 31:1 reduction. Parts are ordered, with the last arriving Sunday. Prototype will be assembled and ready for testing next week.

5
2
35
Better late than never! Here's my week 3 update for s5
@_nightsweekends
. I've already got some good stuff lined up for the remainder of this week: project pages launching, the next release of the WOLF actuator, and an
@openscad
generator for bearings!
CC:
@_buildspace
@FarzaTV
1
3
35
No lubrication added to the gears yet. Easy to do when fully assembled, as they are still accessible.
1
5
33

Got the assembled unit on the table. Not gonna lie, it's larger IRL than it looked on my computer 😅
The final hip assembly will have to be scaled down greatly. Luckily, I have a design ready to be printed and assembled. In the meantime, I can use this to test the actuators.


2
1
33
Currently cooking something up. Going to experiment using WOLF and see what happens. ⚙️
3
3
33
"Gearing up" to assemble more actuators this week.

2
3
32
Distal cable link for the capstan drive. Optional added reduction for the actuator. Drive it from anywhere in the body. Printing now.


2
4
31
Outer drums for distal motor connection seem to work well 👍

0
1
31
I've started comparing brushless motors to use for the tendon drive system. The document is far from complete, so feel free to add to it! :)
The trusty 8318 is on there, too. Specs for it might not be 100% accurate due to the varying data I found.

1
2
32
Test demo video(s) of the new actuator. First, startup calibration. Then, ramped velocity position control.
Printing new mounts and outer rings now to facilitate torque and load testing. Mounts will include M3 (shown), M4, M5, and M8 variants for multiple applications.
7
6
31
Overall dimensions at the output are much better: 53.5 mm wide.


1
0
30