
Jiaheng Hu
@JiahengHu1
Followers
354
Following
254
Statuses
78
Ph.D. Student @UTCompSci | Reinforcement Learning for Robots | Previously @Columbia @CarnegieMellon @allen_ai
Austin, TX
Joined March 2022
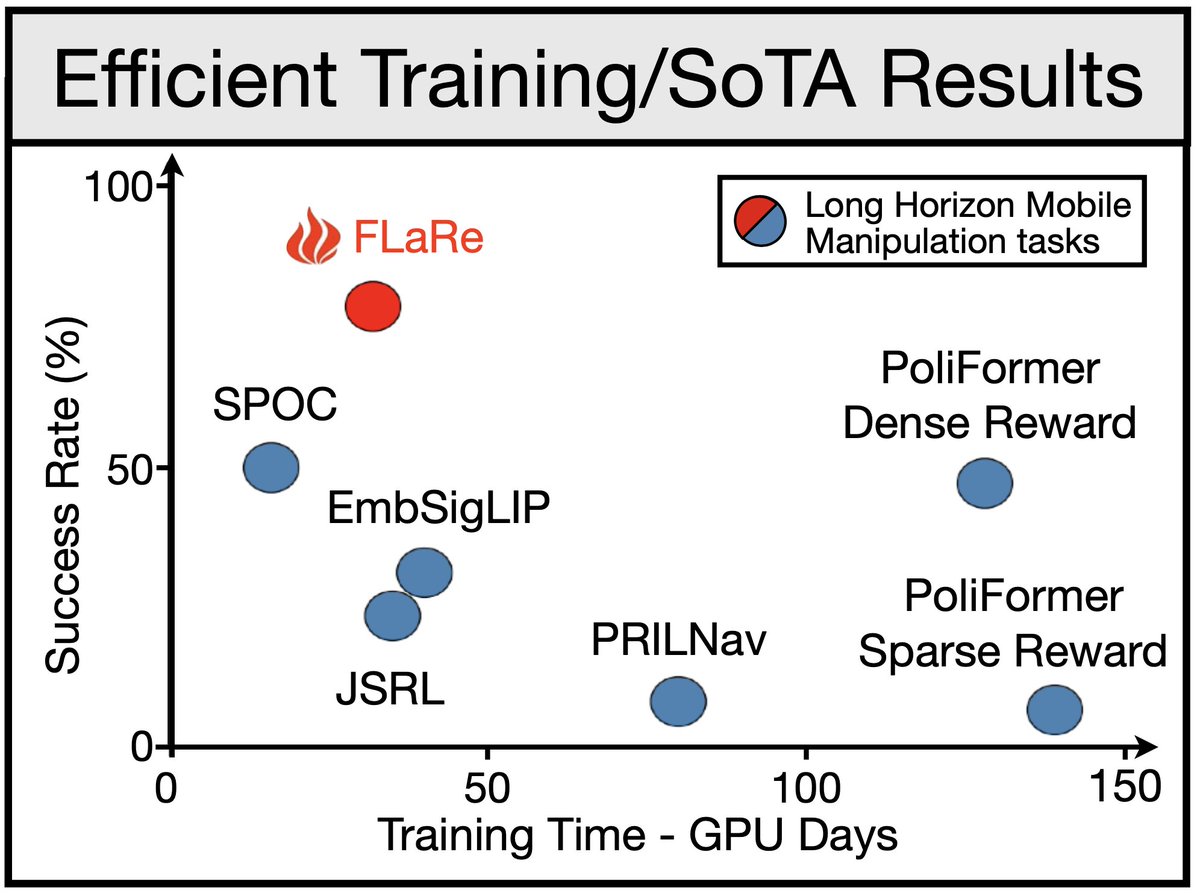
🚀 Despite efforts to scale up Behavior Cloning for Robots, large-scale BC has yet to live up to its promise. How can we break through the performance plateau? Introducing 🔥FLaRe: fine-tuning large-scale robot policies with Reinforcement Learning. 🧵
1
37
122
@aaronwetzler @anikembhavi @RobobertoMM @PeterStone_TX @KuoHaoZeng @ehsanik @allen_ai @RAIVNLab @MobileManip @utlarg @RobInRoboticsUT Correct - no human reward for training.
0
0
1
@aaronwetzler @anikembhavi @RobobertoMM @PeterStone_TX @KuoHaoZeng @ehsanik @allen_ai @RAIVNLab @MobileManip @utlarg @RobInRoboticsUT Thanks! Yes - there is an explicit classifier to mark task completion in the simulation, and in real life evaluation this is measured by the human operator. Feel free to check out our code ( if you want to learn more about it!
1
0
0
1
0
3
RT @yoonchangsung: I am excited to share that I will be joining Nanyang Technological University (NTU), Singapore, as an Assistant Professo…
0
20
0
RT @KuoHaoZeng: Incredibly honored to share this amazing news! PoliFormer has won the Outstanding Paper Award at @corl_conf 2024! 🎉 Check…
0
7
0
RT @ShivinDass: I'll be presenting Learning to Look 👀 in-person at #CoRL2024 tomorrow! Come chat with me at the poster session on Wednesda…
0
4
0
RT @m_wulfmeier: Usually robot videos are accelerated to show progress. Instead, one of the super exciting parts of working with soccer is…
0
28
0
RT @huihan_liu: With the recent progress in large-scale multi-task robot training, how can we advance the real-world deployment of multi-ta…
0
48
0
RT @YuchenCui1: 🚀 I am recruiting PhD students for Fall 2025 at the UCLA Robot Intelligence Lab! 🤖 If you are interested in robot learning…
0
119
0
RT @yifengzhu_ut: 📢New Release📢 We are excited to announce **robosuite v1.5**, supporting more robots, teleoperation interfaces, and contro…
0
53
0
What's particularly exciting about SkiLD is that it enables an agent to learn very sophisticated skills such as grasping a knife and using it to cut fruits WITHOUT any task reward or demonstrations -- truly open-ended learning. Check our paper for details!

In multi-object env, why do most Unsupervised Skill Discovery methods fail to learn complex skills like tool use? Because they simply maximize state coverage. Introducing our solution SkiLD: Skill Discovery Guided by Factor Interactions (NeurIPS24)
0
2
9
How can a robot intelligently collect information and make the right decision based on the collected info? Decomposition is the key! Check out our #Corl2024 paper led by @ShivinDass for detail

Intelligent agents such as humans explore their surroundings to gather information and complete tasks. In our #CoRL2024 work -- Learning to Look 👀, we teach robots to find relevant information in their environment. 🤖✨ 🌐: 🧵👇
0
0
7
RT @yukez: The million-dollar question in humanoid robotics is: Can humanoids tap into Internet-scale training data such as online videos d…
0
108
0
To learn more, check out: Paper: Website: Code: Work done at @UTAustin @utlarg @RobInRoboticsUT with an amazing team @duke_zzwang @PeterStone_TX @RobobertoMM
0
0
1