

Robotic Systems Lab
@leggedrobotics
Followers
12,832
Following
177
Media
302
Statuses
635
The Robotic Systems Lab designs machines, creates actuation principles, and builds up control technologies for autonomous operation in challenging environments.
Zurich, Switzerland
Joined March 2016
Don't wanna be here?
Send us removal request.
Explore trending content on Musk Viewer
#TGS2024
• 192887 Tweets
Miami
• 102699 Tweets
Knicks
• 86300 Tweets
Towns
• 74987 Tweets
Minnesota
• 71529 Tweets
Randle
• 66334 Tweets
León
• 66257 Tweets
mingyu
• 53514 Tweets
भगत सिंह
• 50906 Tweets
Donte
• 41552 Tweets
Wolves
• 39800 Tweets
Paola
• 31972 Tweets
The ACC
• 30055 Tweets
DiVincenzo
• 29603 Tweets
#DAY6INBKK2024
• 28937 Tweets
日本破壊クソメガネ
• 22114 Tweets
Virginia Tech
• 20101 Tweets
Cam Ward
• 19536 Tweets
#キントレ
• 17221 Tweets
Canes
• 15528 Tweets
महान क्रांतिकारी
• 14382 Tweets
Rutgers
• 13347 Tweets
ババコンガ
• 11639 Tweets
#bhagatsinghjayanti
• 10825 Tweets
#AFLGF
• 10023 Tweets



















If you missed the humanoid-quadruped transformer at
@nvidia
's
#GTC
, then you can watch the full video here:
#Robotics
#reinforcementlearning
#nvidia
#transformer
#swissmile
@ETH_en
@nvidiaomniverse
@NVIDIAGTC
25
826
2K

The
@swiss_mile
robot greets the president of Switzerland
@ignaziocassis
#Robotics
#swissdigitaldays
@dgt_switzerland
8
237
850
🔥Exciting news 🤖
Our latest research by
@HoellerDavid
,
@rdn_nikita
,
@2nisi
in
@SciRobotics
unlocks new achievements: Unprecedented agility in quadrupedal robots, mastering locomotion, navigation, and perception through deep reinforcement learning!
@NVIDIARobotics
22
124
604
7
116
438
Transformer robot is now opening doors for you!
@ETH
@swiss_mile
@eth_dmavt
Full video:
Authors: Clemens Schwarke, Victor Klemm, Matthijs van der Boon, Marko Bjelonic, and Marco Hutter
#robotics
#ai
#reinforcementlearning
#ethzurich
3
131
409
We released our physics engine and a few RL examples. Check out our github repos below!
raisimLib (): simulator
raisimOgre (): visualizer
raisimGym (): gym examples
5
152
395
Wild ANYmal!
We present an exceptionally robust perceptive reinforcement learning controller for legged robots in our latest
@SciRobotics
article.
Full video:
Paper:
@ETH_en
@ETH
@ScienceMagazine
#robot
#AI
#science
#WildANYmal
6
69
317
1
115
262
See you all at the 4th ICRA 2020 workshop in Paris!
Full video:
@BostonDynamics
@MIT
@ETH_en
@ETH
@anybotics
@PALRobotics
@DIC_LAB_IIT
@agilityrobotics
@ExoWandercraft
@Ghost_Robotics
@UnitreeRobotics
@CSIRO
@oxfordrobots
@robotics_deep
@ucl
@Caltech
2
81
223
5
45
216
Excited to unveil Orbit v0.3 with many new features & improvements. Orbit is a modular robot learning framework that leverages the latest simulation capabilities and supports different learning paradigms! Join us in revolutionizing robotics! More info here
2
42
218
3
82
195
Check out our ICRA 2020 presentation about hybrid locomotion for wheeled-legged robots!
Full video:
@ETH
@ETH_en
@IEEESpectrum
@icra2020
#robots
#optimization
#trajectoryoptimization
#autonomy
#autonomousrobot
2
57
194
Crafting multi-contact loco-manipulation behaviors for sparsely-defined tasks, like traversing spring-loaded doors or closing heavy dishwashers, is challenging. Check out our proposed solution for our legged mobile manipulator:
@SciRobotics
@ETH_en
2
29
183
2
55
180
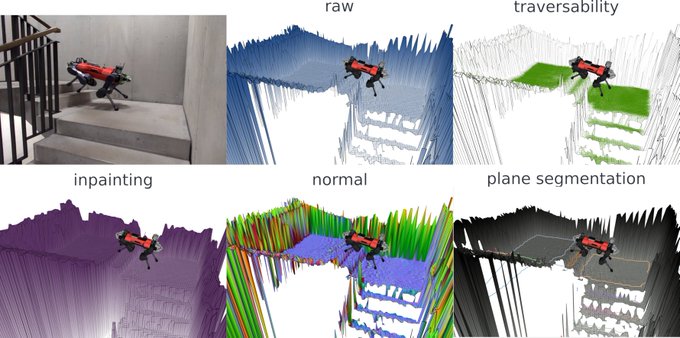
We open source our fast GPU based elevation mapping software!
This includes features like traversability estimation and inpainting which are useful for navigation and legged locomotion.
It was used during the DARPA SubT Challenge by team
@CerberusSubt
.
1
36
171
Stay tuned!
@ETH_en
@ETH
@anybotics
#robot
#leggedrobot
#wheeledrobot
#ETH
#ai
#ArtificialInteligence
#Zurich
#anymal
1
44
165

3
38
151
Out today in
@SciRobotics
, we introduce a kilometer-scale autonomous navigation system for wheeled-legged quadrupeds.
Project website:
Paper link:
@swiss_mile
@junja941
@ki_ki_ki1
@MBjelonic
@schlurry
#ScienceRoboticsResearch
5
33
149
Zurich's biggest spring parade, the Sechseläuten, had this year a robotic guest of honor! See the full video here:
#stadtzunft
#Sechsel
äuten
#S
ächsilüüte
#Zurich
#swissmile
#robotics
#explosion
@ETH_en
@ETH
@eth_dmavt
@anybotics
2
47
127
Check out our
#ICRA2024
paper "ViPlanner: Visual Semantic Imperative Learning for Local Navigation"
introducing a novel planner that combines depth and semantic information.
Website:
Paper:
Full Video:
0
21
132
1. Legged systems have traditionally been controlled using trajectory optimization (TO). Such hierarchical model-based methods offer intuitive cost function tuning, accurate planning, and generalization. However, violations of modeling assumptions are common sources of failure.
1
12
113
After the first
#Rocky
movie in 1976, we present a continuation of the iconic series. Our transformer robot visited Philly as part of
#ICRA2022
.
Video:
@ieee_ras_icra
@ieeeras
@IEEESpectrum
@anybotics
@ETH_en
@ETH
@TheSlyStallone
#Robotics
#AI
1
33
94
Check our new IROS 2022 paper on "Locomotion Policy Guided Traversability Learning using Volumetric Representations of Complex Environments" by Jonas Frey, David Hoeller, Shehryar Khattak, Marco Hutter.
Video:
Paper:
@ETH_en
1
15
96
1
15
87
0
38
85
We show how to fill-in missing elevation information in 2.5D maps with self-supervised learning.
@m_stoelzle
,
@ki_ki_ki1
,
@esa
Youtube:
IEEE RAL:
arXiv:
Code:
#ICRA2022
#robotics
1
19
81
DTC: Deep Tracking Control - Behind the Scenes
video:
paper:
#roboticsolutions
#leggedrobot
#robot
#robotdog
#ai
#reinforcementlearning
#armasuisse
#ScienceRoboticsResearch
#anymal
#searchandrescue
#ARCHE2023
0
12
80
Congrats
@junja941
for an exceptional PhD thesis! One step closer to solving legged locomotion
@ETH_en
@eth_dmavt

6
4
83
ANYmal is becoming friends with monkeys in South Africa!
#monkeybusiness
#robots
#brancoweiss
@InkawuP
@junja941
@samuel_zimi
@eth_dmavt
@ETH_en
3
11
76
Monkey update: they are getting more and more used to the robot! Just the pan-tilt head of
@anybotics
is still a bit scary. 😅
#monkeybusiness
#robots
#brancoweiss
@InkawuP
@junja941
@samuel_zimi
@eth_dmavt
@ETH_en
0
13
75
0
13
71
Roller-walking robot
#ANYmal
in action! Full video:
@MBjelonic
@ETH_en
@ETH
@eth_dmavt
@IEEESpectrum
@BotJunkie
@ericoguizzo
@swissrobotics
@nccrrobotics
@NCCRDFAB
#ETH
#Zurich
#Robot
#Robots
#RollerWalking
#AutonomousVehicles
#Robotics
0
32
68
Join us for the IFRR colloquium on Quadruped Robotics Feb 4th at 4:00pm (CET) on with Avik De (
@Ghost_Robotics
), Sangbae Kim (
@MIT
), Claudio Semini (
@iitDLSLab
), Benjamin Swilling (
@BostonDynamics
), Marco Hutter (
@leggedrobotics
)
0
11
70
Take a look at our new work where we combined learning-based locomotion with model-based arm control for legged mobile manipulators.
@ki_ki_ki1
@junja941
IEEE RA-L:
Youtube:
arXiv:
#robotics
#IEEE
#ICRA2022
0
17
60

@BotJunkie
@BostonDynamics
@BotJunkie
Amazing stand-up maneuver! But why not avoid falling in the first place?
@leggedrobotics
@CerberusSubt
0
2
21
0
8
59
Our teleoperated walking excavator with automated chassis
#HEAP
on its way to work to remove rock slides in a steep river bed in Switzerland. Watch SRF Aktuell on Friday for the full story. With
@swissrobotics
@vbs_ddps
@ETH_en
@sbbnews
@Swisscom
@Menzi_Muck_eu
@Moog_Industrial
0
18
60
Congratulations to Vassilios Tsounis for the successful PhD defense on the application of RL for motion planning and control of quadrupeds!
@eth_dmavt
@rsiegwart
1
3
61

Congrats Dr. Jan Carius, truly exceptional defense presentation! Thanks to
@MarcoPavoneSU
, Scott Kuindersma, and René Ranftl,
@nccrrobotics
@eth_dmavt
@ETH_en
3
3
58
The monkeys are becoming more comfortable with our robot 🥰
#monkeybusiness
#robots
#brancoweiss
@InkawuP
@junja941
@samuel_zimi
@eth_dmavt
@ETH_en


1
9
58


1
5
57
#ANYmal
helped out Santa and Schmutzli today delivering some 🍫 … did you see them around in LEE building?
@ETH_en
@eth_dmavt

2
3
54
Robot vs human push-up competition? 🤔 Come visit our robot show at
#Scientifica19
! Sunday, 1pm and 3pm
1
13
56
#ANYmal
going anywhere! After more than a year of hard work, we present a new level of rough terrain mobility: Learning quadrupedal locomotion over challenging terrain"
@SciRobotics
@ERC_Research
@ETH_en
@THING_H2020
0
9
55
Congratulations to Dr. Hendrik Kolvenbach for his excellent thesis and defense presentation. Let's bring legged robots to space!
@ETH_en
@eth_dmavt

3
3
52
At 11 am UTC, Marco Hutter, assistant professor at
@ETH
and co-founder of
@anybotics
, presents our newest contributions regarding the autonomy of
#ANYmal
.
Zoom link:
@ETH_en
@THING_H2020
@IEEESpectrum
@icra2020
#ICRA2020
#LeggedRobots
0
14
52
Check out our
#RSS2024
paper "Rethinking Robustness Assessment: Adversarial Attacks on Learning-based Quadrupedal Locomotion Controllers" to identify weak spots in the SOTA neural-net controllers.
Full video:
#legged_robot
#reinforcementlearning


RL controllers for quadruped locomotion are great but black-box. Are they safe enough? Our work in
#RSS2024
reveals the risk of small noises and low-frequency velocity commands falling SOTA controller, which helped win DARPA SubT Challenge, even on the simplest flat terrain.
2
16
78
0
9
57

0
9
49
Make sure that you do not miss our
#ICRA
workshop on Friday!
For more information:
#ICRA2021
#Robots
#LeggedRobots
#Robotics
@shamelfahmi
@KrzysztofTWalas
@dkanou
@navindak
@MBjelonic
0
18
50
Check out
@twominutepapers
video on our recent
@SciRobotics
paper.

This Rescue Robot Doggy AI Is Amazing! 🦮
▶️Full video (ours):
📜Source paper:
#ai
#twominutepapers
#whatatimetobealive
#holdontoyourpapers
2
38
135
1
3
49



3
5
49

1
1
20
0
2
50
Congrats to Dr.
@MBjelonic
for successfully defending his PhD thesis on
#ANYmalOnWheels
. This work combines the agility of legs with speed and efficiency of wheels.
@nccrrobotics
@NCCRDFAB
@ETH_en
@eth_dmavt

1
3
50
Our new paper explores the use of parallel elastic actuators in quadrupedal robot design and control, with a focus on utilizing learning-based techniques. Results show promising improvements in efficiency.
#QuadrupedalRobotics
#Robotics
#DeepLearning
1
13
46
1
7
49
1
10
46
2
22
48
3. In our most recent work, we have combined TO and RL to synthesize a unifying control policy that leads to both accurate and robust locomotion (
#ScienceRoboticsResearch
,
@ETH_en
,
@ScienceMagazine
).
Full video:
Paper:
2
10
48
Heavy lifting up the stairs.
#Robotics
#ArtificialIntelligence
#darpa
#subtchallenge
@arlteam
@ETH_en
@ASL_ETHZ
@DARPA
2
8
46

All 16 legs of team
@CerberusSubt
passed the e-stop check and are qualified for the
@DARPA
#SubTChallenge
final prize round.
🦿🦿🦿🦿🦿🦿🦿🦿🦿🦿🦿🦿🦿🦿🦿🦿
@arlteam
@ASL_ETHZ
@dynamicrobots
@ETH_en
1
2
46
Congratulations to (new Dr.) Ruben Grandia for an excellent thesis and defense!! Thanks to Aaron Ames and Michael Mistry for serving on the committee.
@THING_H2020
@nccrrobotics
@eth_dmavt
@ETH_en

0
2
44
Start of the
@ETH_en
@eth_dmavt
robotics summer school 2021. 25 ETH and 25 international students learn in one week how to make an autonomous search and rescue robot.
#ARCHE
@swissrobotics


1
7
46

3
9
44
0
10
44
Congratulations to Giorgio for receiving the IEEE RAL best paper award! This work was done as part of the EU H2020 Project
@THING_H2020
. Check out the paper ()
0
7
46
0
1
42



0
5
44

0
2
42
Marc Raibert and Al Rizzi visited ETH Zurich and our lab today. Thank you for your inspiring talk and checking out our research!
#ai
#robotics
#engineering
#research
@BostonDynamics
@ETH_en

1
5
43

0
5
42


0
10
41
Final integration of
@CerberusSubt
in Schollberg for the
@DARPA
subT challenge. The
#ANYmal
pack can't wait to explore

0
2
40
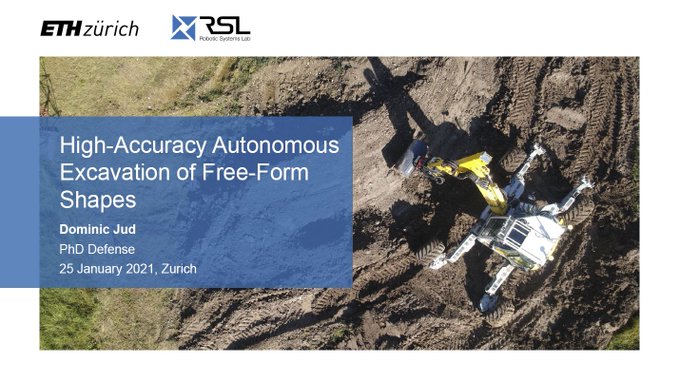
Congratulations to Dr. Dominic Jud for successfully defending an excellent PhD thesis
@ETH_en
@eth_dmavt
. See what an autonomous excavator can do:
3
2
42
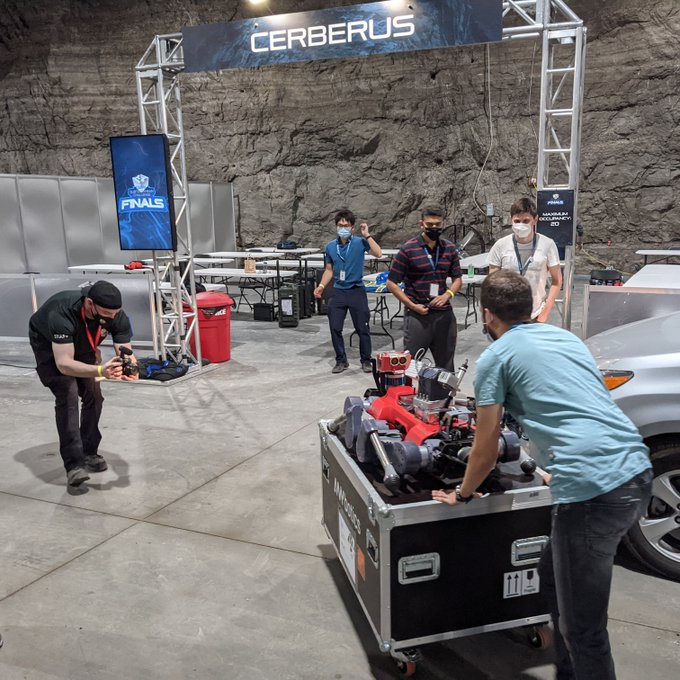
RSL's field test engineers deployed two ANYmal C robots in the Seemühle underground mine as part of Team
@CerberusSubt
for the DARPA
#subtchallenge
A big thank you to Vale Schoch and Peter Schoch for making this possible!

1
4
40
Congratulations Dr. Fabian Jenelten for a successful defense. You managed to bridge
#MPC
and
#RL
to make
#ANYmal
a robust and versatile climber! Stay tuned for great videos to come soon.
@eth_dmavt
@ETH_en

0
2
39
ANYmal was tasked with autonomously exploring an unknown environment surrounding an unfinished nuclear reactor, during an activity of the DARPA Subterranean Challenge. Video:
#darpa
#ETH
#Robotics
#subtchallenge
#AutonomousVehicles
@DARPA
@ETH_en
@ETH
1
7
38
ETH robotics summer school at the search and rescue training village in Wangen aA has started.
@leggedrobotics
@ASL_ETHZ
@nccrrobotics
@ETH_en
@swissrobotics

2
4
38
Thank you for sharing!

💥Incredible humanoid robot!
#AI
#MachineLearning
#Robotics
#CES2022
@leggedrobotics
@ETH
@SpirosMargaris
@Paula_Piccard
@PawlowskiMario
@mvollmer1
@gvalan
@ipfconline1
@diioannid
@Shi4Tech
@Fisher85M
@kalydeoo
@Ym78200
@Nicochan33
@chboursin
@3itcom
@rwang0
@EvanKirstel
@ahier
3
52
80
0
6
34
Congratulations Dr.
@schlurry
for an excellent PhD on autonomous legged robot navigation. This work was deployed in various real wold missions
@DARPA
SubT,
@nccrrobotics
,
@esa
,
@naturalintelli8
,
@digiforest_eu
, and many more.
@ETH_en
@eth_dmavt
Thanks to
@MauriceFallon
@rsiegwart

0
2
37
Great exchange with
@Mitte_Centre
about how robotics can improve the quality of our lives in the future.
@ETH_en
@Joel_Mesot
@pmbregy

1
6
36
Our robotics engineers are testing ANYmal in subterranean environments for the
@DARPA
SubT Challenge. We are part of the team
@CerberusSubt
, with
@ASL_ETHZ
, ARL-Reno,
@fly_ability
,
@SierraNevCorp
, and HiPeR Lab.

0
8
37
Great work of our team
@CerberusSubt
on day one of the
@DARPA
#SubTChallenge
! Good luck to all the teams for the final round.
0
5
35
Successfully completed the first run at the
#SubTChallenge
finals. Now it's all about analyzing data to score even better tomorrow. Go
@CerberusSubt
!

1
1
36
Congratulations to our latest doctoral graduates, Lorenz Wellhausen, Yves Zimmermann and Ruben Grandia, for receiving their doctoral diploma.
@eth_dmavt
@ETH_en
#graduation

0
3
34
The autonomous inspection of sewers is coming closer to reality! Check out our recent work published in the Journal of Field Robotics.
#Robots
#autonomy
Full Paper:
Video:
@ETH
@IEEESpectrum
@oxfordrobots
@EU_H2020

0
17
36
Our work on learning control for
#ANYmal
was selected among Nature's top 10 papers in 2019. Here is the video that explains how it was done:

0
2
34

0
4
35