
リニア・テック 別府 伸耕
@linear_tec
Followers
10K
Following
284
Media
2K
Statuses
4K
リニア・テック(代表: 別府 伸耕)の公式アカウントです.エンジニア向けの数学,物理,工学の動画セミナ+組立キット発売中.Nobuyasu Beppu. Analog/Digital circuit, RF, MPU, FPGA, Signal processing, Web application.
Joined March 2021
トランジスタを1738個はんだ付けしてCPUをまるごと作る地獄のキットを買われた方がいるようです.ありがとうございます!.自分が試作したときは7日間かかりました(他の仕事を何もしない場合)..ぜひロボット部分のシャーシも組み立てて「走り回るCPU」を作ってください..
52
7K
16K
うちもクレジットカードの加盟店になったので,各社のロゴ画像を使うための利用規約を確認しました.. いちばん強火なのはMastercardです..「Mastercardのマークを一番最初に表示しろ.他社より小さいサイズで表示するな.他社のマークを表示するならうちのマークも必ず表示しろ.」

39
3K
13K
毎年恒例ですが,うちのクリスマス・ツリーです.. トランジスタ(MOSFET)1,738個,LED 1,198個をはんだ付けして作ったフル・ディスクリートのCPUです..
38
2K
9K
「オイラーの公式」ば美しい数式だとか神秘的だとか言われますが,技術者から見ると「ただのsinとcosを同時に表現するための道具」です.これがとにかく便利すぎるので,あらゆる物の設計で使うことになります.. ●技術者のための本質を学ぶ数学1 初等関数と微分・積分.
11
911
5K
「ラプラス変換」(フーリエ変換を含む)とは何をやっているのか? という話を1枚の図で表すとこんな感じになります.. 「正弦波に分解して,伝達関数をかけ算して,処理後の正弦波をぜんぶ足す」という流れにより,結果的に「微分方程式を解く作業」を簡単に行っています..

5
590
4K
大掃除をしていたら前に作った「高速フーリエ変換器」が出てきました.せっかくなので動画を撮りました.. マイコンやCPUは使わず,NOTやANDゲートなどのIC(74HCシリーズ) 約1000個(+ RAM)で構成されています.すべて手実装,手配線です.
10
797
3K
「ディジタル回路は "1" と "0" だけでわかりやすい」という考え方は間違っているわけではありませんが,「すごく遅い信号」を扱う場合に限定されるのでお勧めしません.. 実際の高速ディジタル伝送を扱う回路が "0" や "1" の状態になる時間はわずかで,大部分は「アナログ動作」になっています.

10
849
3K
電磁気学をやっていると「電場や磁場は目に見えないからわからん」という声を聞きますが,人間の「目」は光(電磁波)を感じ取る器官なので,むしろ「我々は電場と磁場しか見ていない」が正しいです.. 自分が何を見ているのか,正しく理解しておくと色々面白くなります..

2
603
3K
小学生のころ「モータの回転を自由に調整したい」と思っていました.スイッチによる単純なON/OFFには飽きていました.. 当時たまたま読んだ本で「トランジスタ」という電子部品を使えば良いと知りました.初めてモータの回転をなめらかに制御できたときは,とても感動した覚えがあります.
4
366
3K
ちょっと前に「トランジスタを1,738個はんだ付けして作るCPU」を設計しましたが,これの狙いは「複雑な回路をわかりやすい基本単位まで分解して徹底的に解説すること」でした.. 似たような発想で「技術者向けの数学の集大成である特殊関数を完全にボトム・アップで解説する」というのをやりたいです.

7
518
2K
『フルディスクリートFMラジオ・キット』完成しました.これは・・・まさに自分がずっと欲しかった物です!. 「FMラジオ用ICの内部はどうなっているの?」という疑問に答えるために,一般的なラジオICの回路をすべて基板上に展開しました.ICは1つも使わず,すべて個別の部品で設計しています.
20
1K
2K
多くの大学では1年生の4月から「微分・積分」と「線形代数」の授業があると思います.「これは何の役に立つの?」と思われるかもしれませんが,最初のうちはカリキュラムを信じることをおすすめします.. 例えば,このロボットは微分・積分と線形代数がないと設計できません..
11
685
2K
「微分や積分がわからない」と言う人の大半は,「微分・積分の対象である関数」の扱いに慣れていないことがほとんどです.(微分・積分そのものは,そこまで難しい話ではない). よく使う関数の種類は多くありません.これさえ押さえておけば,かなり楽になります..

3
316
2K
人間の成長は非線形なので,「頑張ってる割に全然伸びない」という時期を経て「あるとき急に理解が進む」という事がよくあります.. 数学や物理のように抽象的な内容ほど伸び始めるまで時間がかかり,具体的な話はすぐにサチる傾向にあります.とりあえず「損益分岐点」を超えるまで頑張りたいですね.

10
477
2K
微分・積分のセミナをやるとき.「これが全ての基礎になります」. フーリエ解析のセミナをやるとき.「これが全ての基礎になります」. 電磁気学のセミナをやるとき.「これが全ての基礎になります」. 同じことを言ってますが,本当にあらゆる物を設計するための「土台」なので,ぜひ押さえて欲しいです.
4
428
2K
ラプラス変換は,言い方が悪いですが「アホでも微分方程式を解けるように作られた手法」だったはずが形骸化して手法が独り歩きした結果「微分方程式を解く」という本質が忘れられて「よくわからんけど試験対策でラプラス変換だけはできる」みたいな人が大量生産されているようで複雑な気持ちになります.
3
338
2K
熱力学で出てくる「なんとかエネルギー」(熱力学ポテンシャル)のまとめです.. ●全部エネルギーなので結局は「仕事として取り出せる量」の話をしている.●「何を一定にするか」によって使い分ける.●「一定にする量」は実験者がその値を設定できる(独立変数)はずだから関数の引数になっている

3
229
2K
電子回路設計では「インピーダンス」という便利な道具を使いますが,本質はあくまでも「微分方程式」です.インピーダンスは「正弦波信号を印加する」という特別な状況で現れる,ただの比例定数に過ぎません.. これらの微分方程式は「マクスウェル方程式」から導出されます..

3
290
2K
線形システム(電子回路とかロボット)の解析に絶大な威力を発揮する「フーリエ変換」ですが,使える範囲は意外と狭く,対象とする関数の絶対値 |f(x)| を-∞から∞まで積分しても発散しない(絶対可積分)という,けっこうキツめの縛りがあります.. そこで考案されたのが 「ラプラス変換」 です.

3
316
2K
学生の頃に作った『高速フーリエ変換回路』もキット化したいと思っています..汎用ロジックIC(74HCシリーズ)を1,000個使い,FFTに特化したハードウェアです.4096pt FFTを1秒間に10回こなします..ユニバーサル基板を使いすべて手実装・手配線です..(FPGAを使えなんて,そんな野暮な...)

9
463
1K
電磁気学(マクスウェル方程式)がわからない場合,その理由は何段階かに分けられるのですが,その1つは「ベクトルがわからない」というものです.. ベクトルのたし算やひき算は直感的にわかりやすいですが,かけ算は2種類あり「内積」と「外積」を理解する必要があります.簡単にまとめました.

4
228
1K
最近の新刊「地力をつける 微分と積分」を読了しました.副読本的な位置づけの良書です.. 「この本は東京大学の1, 2年生の文科のクラスにおける講義がもとになっている」とのことですが,むしろ,微分・積分をひととおり学んだ後に読んでも良いほど濃い内容が詰め込まれています.

1
196
1K

信号処理と電磁気学の両方を知っている方なら,「クーロンの法則」とか「ビオ・サヴァールの法則」が「線形システムの出力を求める式」とまったく同じ形に見えるかと思います.. おなじみの「畳み込み積分」というやつですね.電荷分布や電流分布は,まさに系に対する「入力」としてイメージできます.

2
270
1K
ガンマ関数やベッセル関数といった特殊関数の話をするには「複素関数論」を避けて通れません.いろいろ抜け道を探してみたのですが無理でした.. 要は「コーシーの積分定理」を使いたくて,これがわかれば「コーシーの積分公式」も「ローラン展開」も「留数定理」も全部同じように見えるはずです.

3
300
1K
ロボットや電子回路を設計したいなら,早めに「設計とは微分方程式を扱うことだ」という感覚を身に着けることをおすすめします.. 一般的な「微分・積分の計算」というよりも(それも大事だが),「微分方程式は未来を予測する道具だ」という事実を理解するのが最重要です..

4
262
1K
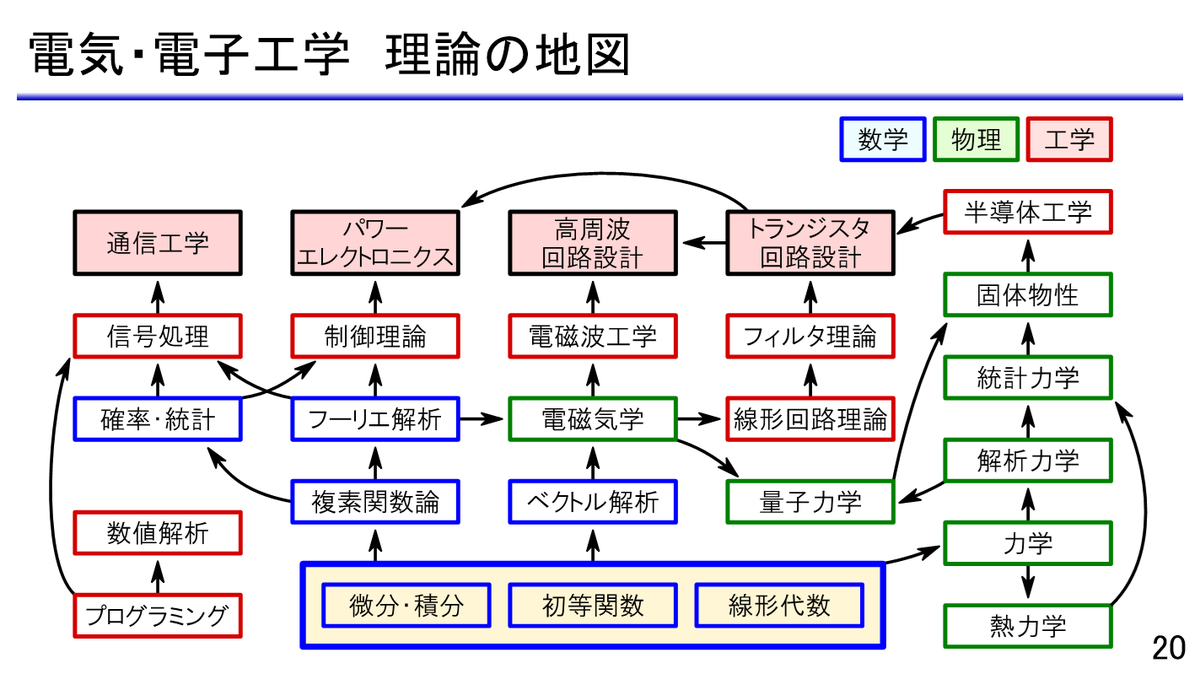
電子回路に限らず数学・物理の分野まで含めて,「やる気はあるけど何から学べば良いのかわからない」という方のために地図を作ってみました.あくまで「こういう風に見えている人もいるのか」という程度に留めていただければと思います.. 以下のスレッドで各分野の参考文献を紹介します(不定期).

4
307
1K
電気回路設計の究極の目的は「回路中のすべての電流を知ること」とも言えます.電流とは「電荷の動き」であり,電荷を動かすのは「電場」です.よって回路設計は「電場」で考えるのが素直そうに思えますが,現場の技術者が使うのは「電圧」(電位差)です.. なぜかというと,その方が楽だからです.

3
185
1K
毎年恒例うちのクリスマス・ツリーです.約6,500個の電子部品を手作業ではんだ付けして作った4ビットのCPUです.. CPUの動作を目で見たかったので,すべての信号線にLEDを付けました.論理ゲートの入力が赤色,出力が緑色に光ります."1+2+3+4+5=15" という計算を実行しています.
2
424
1K
電子回路設計の8割以上は「LCR回路の設計」であり,その本質は電磁気学の「マクスウェル方程式」で表されます.. 電子回路の花形は半導体だと思われがちですが,「半導体中の電子輸送を理解できずに不具合を出した」という例は少なく,大抵はLCRの無理解が問題を起こします..

1
218
1K
「マクスウェル方程式なんて,知りたい人がいるんですか?」と言う人がいました.. マクスウェル方程式は「電磁気学」の核心ですが,電磁気学は「理論の地図」の中心に位置します(意図せずこの形になった).これを見ても「不要だ」と判断されるなら,それまでだと思います..

4
217
1K
寒くなってきたので,たくさんはんだ付けしたくなりますね(?) 1738個のトランジスタで作る『フルディスクリートCPUキット』好評発売中です.. ��べての信号線にLEDが付いているので,回路の動作にあわせて光ります.ロボット用の車体も付属.全部品点数7,000個..
14
311
1K
中学生のころ初めてプログラムを書いた時は,アセンブラしか知りませんでした(���識が偏っていた).. 大学1年生の時,先輩に「C言語使わないの?」と言われました.int a = 1; などと普通の数式のように書けるので,「レジスタ構成とか知らなくていいの!?便利すぎる!」と感動した覚えがあります..
3
112
1K
これまで設計したICに対して「正しく動かない」や「性能が出ない」などの問い合わせがあった時,その原因の第1位は「お客さんが作った基板のGNDが弱い」でした.. GNDは広いベタにしてインピーダンスを小さくすることが重要です.ユニバーサル基板でも,銅テープでベタを作るだけでかなり改善します.

5
279
1K
「固有ベクトル」の視覚化. ●もとになるベクトル "x" (青色)は長さ "1" です.角度をいろいろ変えています..●"x" を行列 "A" によって線形変換した結果がベクトル "y = Ax" (赤色)です..●"x" と "y" が平行(今回は重なる)になるとき,その "x" が行列 "A" の「固有ベクトル」です.
3
162
1K

電子回路を設計する時は「電圧」を使いますが,これは「エネルギを中心に考える」ことを意味します.. エネルギの観点に立つと,抵抗Rは「エネルギを消費する部品」,キャパシタCは「電場のエネルギを蓄える部品」,インダクタLは「磁場のエネルギを蓄える部品」となります..

2
157
979
高校で三角関数を習ったときは,正直なところまったく興味を持てませんでした.. 「現実で目にするほとんどの波形はsinとcosの組み合わせで作れる」という強烈な事実を早く教えてほしかったです.三角関数はおそろしく汎用性が高い道具なので,大学入試でほぼ必ず出題されるのも納得です.
7
253
995
大学で習う数学の中でも実用性 No.1なのが「フーリエ解析」です.これは,設計で不可欠な微分や積分を「小学校で習う比例(定数倍)の計算」に変換するための道具です.いわば「微分・積分を回避するためのツール」です.. 技術者のための本質を学ぶ数学3 「フーリエ解析」.

3
118
991
「コンピュータの仕組み」を学ぶなら自分で作ると良いと思います.『CPU自作キット』好評発売中です.宝物になりますよ.. ※動画は 1 + 2 + 3 + 4 + 5 = 15 を計算している様子です..
2
208
962
運営さんとも話していましたが,今年やった「マクスウェル方程式」のセミナは現時点における自分の最高傑作です.半年以上かけて準備をして,気合を入れすぎたせいで仕事が終わった途端に体調を崩すほどでした.. 2日分のセミナ動画です.テキストは500ページあります..

4
178
960
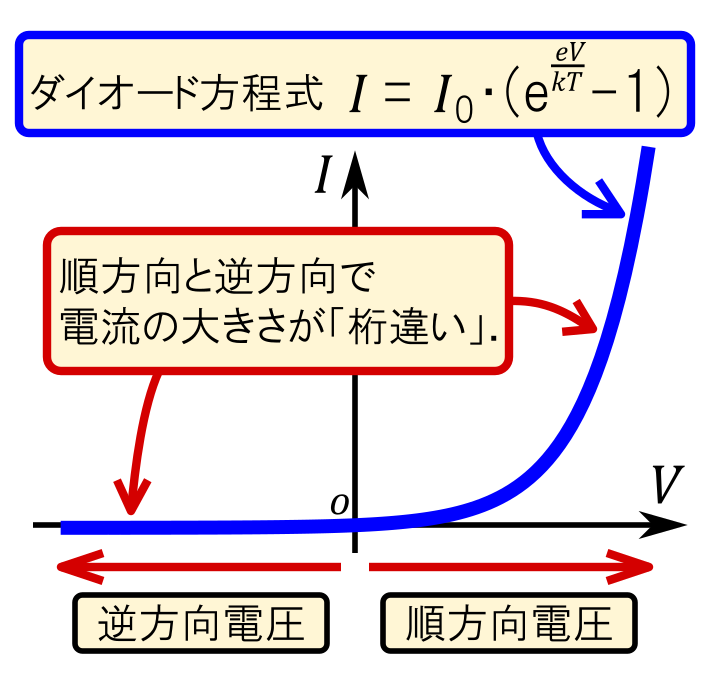
ダイオードはなぜ「一方向だけに電流を流す」のか?. 実際は「指数関数」の形が見えているだけです.順方向電流と逆方向電流の大きさが桁違いに異なるので,まるで「順方向でON・逆方向でOFF」というディジタル的な動作をしているように見えます.ダイオードの電流特性はあくまで連続的です.
2
200
964
世界最初期のコンピュータ "ENIAC" (エニアック)は,「積分」をするために作られました."I" は "Integrator" (積分器)の頭文字です.そこまで必死に「積分したい」と思うほど技術者にとって重要な演算です.. 「積分なんて面積を求めるだけのつまらない計算でしょ?」というのは大きな誤解です.

2
201
957
「トランジスタ」や「ダイオード」など,個別の半導体部品(ディスクリート部品)だけで電子回路を作ることを「フル・ディスクリート」といいます.. 電子回路を理解するには,フル・ディスクリートで設計・製作してみるのが一番です.そうやって理解した後で,ICを使って楽をすれば良いかと思います.

2
193
894
電子回路を思い通りに設計したいなら「電磁気学」を習得するのが一番の近道です.高校レベルの数学から電磁気学の集大成である「マクスウェル方程式」まで,この図の「山」を登りながら全部解説します.. 技術者のための本質を学ぶ物理3 電磁気学.

2
140
900
エンジニアリングとは「理論を熟知した上で泥臭いことをする」営みだと思っていて,「理論や数式という武器を持たずにただ泥臭いことをする」のはただのデタラメで時間の無駄です.そんなことするくらいなら最初から寝てた方がいい.(無能な働き者…の話に通じる).
1
189
855
いわゆる「IoT機器」を作る時は,次の3つのノウハウをおさえておくと見通しがよくなります.. ●インターネットのしくみ(IoTの "I" は Internet).●マイコンのハードウェア(普通は組み込み系に実装する).●プログラミング(組み込み系ではC言語をよく使う).
2
84
797
「電磁気学がわからない」とか「流体力学がわからない」という場合,先に「ベクトル解析」をまとめて理解しておくと非常に楽です.. 高校数学からはじめるベクトル解析 全10回 再生リスト.

1
137
805
大学生の時に1,000個の汎用ゲートIC(74HCシリーズ)をはんだ付けして作った「高速フーリエ変換回路」と,今回作った「FPGAでFFTを実行するシステム」を並べてみました.. 両方とも4096pt FFTを計算する回路ですが,FPGAの方が100倍ほど速いです.また,FPGAのリソース使用率は10%以下です.
10
181
770
抵抗R,キャパシタC,インダクタLで構成された「LCR回路」は,半導体を使った回路と比べて「地味でつまらない」と思われるかもしれません.. しかし実際の回路設計では半導体デバイスを「LCR + 電源」でモデル化して扱うので,すべての電子回路設計は「LCR回路の設計」に帰着します.LCRがすべてです.

2
131
743
ソフトウェアやFPGAなどに実装した演算と,その信号処理的な用途・意味との対応表を作りました.. コンピュータは基本的に「加算」,「減算」,「乗算」,「除算」(乗算の一部と見る)の組み合わせを実行しますが,「よく使う組み合わせパターン」を理解しておくとコーディングや解釈が楽になります.

2
112
719
信号処理でよく��てくる「畳み込み積分」は,「波形をずらして並べていって最後に全部足す演算」です.. おなじみの「インパルス応答を畳み込み積分してシステムの出力を求める」という操作でイメージするとわかりやすいかと思います.これはディジタル・フィルタの設計で本質的な役割を果たします.

2
134
699
このロボットでは古典制御理論の「PID制御」ではなく,現代制御理論の「最適制御」を使っています(細かい話は後述).. 要は,システムの周波数応答を中心にして試行錯誤的にフィードバック係数を決めるのではなく,リッカチ代数方程式を解き状態フィードバックのパラメータを一発で決めています..
「ロボットを作ってみたいのですが,どうしたら良いですか?」という質問をよくされます.まずは自分の方向性を決めるのが重要かと思います.. (1)「設計」できるようになりたい.→すべての土台は数学です. (2)とりあえず動くものを作ってみたい.→まずは既製品のキットを作ってみましょう
2
138
702
電子回路の本質的な目的は「信号に対して数学的な計算処理を施すこと」ですが,そのアプローチはアナログ回路とディジタル回路で対照的です.. アナログは物理現象によって(勝手に)意味のある演算が実行されるのに対して,ディジタルは自分で定義した(コーディングした)演算処理しか実行されません

3
136
693
「微分・積分」を学ぶときの1つの目標は「オイラーの公式を理解すること」だと思います.. オイラーの公式はあらゆるエンジニアリングの分野で使われる重要な式ですが,その理由は「三角関数と指数関数をつなぐインターフェースとして機能するから」だと言えます..

3
121
669
「ロボットを作ってみたいのですが,どうしたら良いですか?」という質問をよくされます.まずは自分の方向性を決めるのが重要かと思います.. (1)「設計」できるようになりたい.→すべての土台は数学です. (2)とりあえず動くものを作ってみたい.→まずは既製品のキットを作ってみましょう
3
125
665
線形代数のわかりやすい応用といえば「現代制御理論」ですが,この現代制御理論と確率・統計を組み合わせたアルゴリズム(オブザーバの一種)が「カルマン・フィルタ」です.. カルマン・フィルタは,センサの値に含まれるノイズや外乱を取り除くために使われます..
1
109
660
「なんでトランジスタって動くの?」という話,かなり面白いと思うんですよね.これがわかると「コンピュータの動作原理」とか「ICの中身」を理解できて,電子回路に対する解像度が爆増します.. いわゆる「半導体工学」を天下り的でなく,感覚的でもなく,きちんと理解するためのセミナをやりたいです

4
122
650
電子回路を設計したいなら「電磁気学」を学ぶのが最短の早道です.電磁気学を理解するには「ベクトル解析」を習得する必要があります.ということで,高校数学からはじめてエンジニアに必要なベクトル解析を網羅します.. Digi-Key公式チャンネルの新しい動画シリーズです..

1
113
629
アナログ回路の試作をするときは,基本的にユニバーサル基板やブレッドボードはおすすめしません.ノイズやGNDの揺れの影響で設計どおりに動作しないことが多く,余計な考察・検証に工数をとられるからです.. 試作段階でプリント基板を起こせない場合は,ベタ基板を使うのがおすすめです.

2
141
619
『科学者・技術者のための 基礎線形代数と固有値問題』という本を入手しました.. 伝達関数や周波数特性,インピーダンスなどを扱う技術者の仕事は,本質的に「固有値をいじること」に帰着します.この本では物理学や統計学,経済学などを題材として,固有値の重要性がとても丁寧に説明されています.

2
89
609
フーリエ変換やラプラス変換といった「フーリエ解析」の技法は,「様々な波形は正弦波の和によって表せる」という事実に支えられています.. 当然ですが,「和」(たし算)が成り立たないシステムではフーリエ解析は使えません.つまり,非線形システムでは通用しません..

1
104
613
回路設計をしていて「キャパシタ(コンデンサ)は使えるけどインダクタ(コイル)は難しい」と感じる方は多いかもしれません.. キャパシタは「電場」だけ理解すれば良いのに対して,インダクタは「電場と磁場」の両方(しかも時間的に変化するやつ)を理解しないといけないので難しく感じて当然です.

1
84
605
「複雑な問題は個別の要素に分解する」というのは問題解決の定石です.しかし,この「分解する」という考え方は暗黙のうちに相手が「線形」であることを仮定しています.. 分解という操作は「線形代数」における1つの本質です.これを意識すると非常に見通し良く線形代数を学べます.

1
68
615
牧島 一夫 先生の『目からウロコの物理学』の第2章,電磁気学の部分を読了しました.この本すごく濃いですね!. 誰もが持つであろう素朴な「物理のモヤモヤ」に明快な答えを与えてくれます.対象読者は「一通り基本的な物理学を学習した,大学の学部高学年レベル」とのことで,力試しにもなりそうです

1
77
526
今回作った「FPGAでFFTを実行して周波数スペクトルをディスプレイに表示するシステム」を題材として,微分・積分や線形代数といった数学の基礎から始めて,フーリエ解析,ディジタル信号処理,FPGA設計開発までを一気通貫で解説するようなセミナを作ってみたいと思います.

1
86
532
エンジニアリングにおける「微分」の使い道は,本質的に次の2択です.. ●1ステップ先の挙動を知りたい.各点の傾きの情報(微分係数)を使って「設計」(つまり未来予測)したい.. ●極値の位置を知りたい.仕様の範囲内で「最大効率」や「最短時間」などを達成できる点を探したい.

2
81
522
ラズパイPicoで制御している倒立振子ロボットです.カルマン・フィルタを使った姿勢推定を行っています.. Inverted pendulum robot using Kalman filter for position/orientation estimation. The calculation is performed on the Raspberry Pi Pico.
5
88
504
電源回路では,このような形の「トランジスタ1個で作れるノイズ除去フィルタ」をよく見かけます.. 本質的な動作は「エミッタ・フォロア」そのものです.ノイズが多い電源(スイッチング電源など)と負荷の間に入れると,かなり大きな効果を発揮します.オーディオ・アンプやPLLなどに重宝します.

3
76
497
LEDを点滅させる回路は「Lチカ」などと呼ばれますが,マイコンを使わなくても作れるというか,もともとはこの「無安定マルチ・バイブレータ」がオリジナルです.. 個人的には,こういうアナログ動作(プログラムを必要とせず電磁気学的な現象の結果として動く)のほうが知的好奇心をかきたてられます.
1
84
482
数値計算のプログラムを書くときは「抽象的な数式を具体的な計算処理として書き下す作業」が必ず発生するので,適切なお手本さえあれば高い学習効果が得られる気がします.. そんなわけで,電磁気学の難関(?)である「ベクトル解析」をプログラムを書きながら具体例で学べるように準備しています.

2
57
485
電磁気学で使うベクトル解析には「勾配」,「発散」,「回転」といった微分演算が用意されています.. 「勾配」は「微分」そのものですが,「発散」の本質は「面積分」,「回転」の本質は「線積分」です.表面的には「微分」の計算なのに,意味的には「積分」が絡んでいます..

2
73
476
微分・積分は「未来予測」のための道具である..↓.いわゆる「シミュレーション」では積分を実行する..↓.積分をするために開発された装置が "computer" (コンピュータ)つまり「計算機」だった.. 技術者のための本質を学ぶ数学1 微分・積分.

1
72
462
エンジニアリングに関する「理論の地図」を更新しました.すべての土台である数学と物理の大まかなつながりを把握することを狙っています.. 自分が電気系なので回路設計をゴールとしていますが,ほとんどのエンジニアリングは「線形システムの設計」に帰着するので基本的な部分は共通かと思います.

4
89
454
電子回路の設計者が電磁気学を学ぶモチベーションは単純で,「電荷が動く理由を知りたいから」です.. 回路が動くとは「電流が流れること」であり,電流とは「電荷の動き」です.電荷を動かす原因は「力」であり,その力は「電場」と「磁場」だけで表せます.それをまとめた体系が「電磁気学」です.

2
54
438
電磁気学を学ぶ時は「クーロンの法則」や「ビオ・サバールの法則」の係数が意味不明だと感じるかもしれませんが,これは単なる「帳尻合わせの定数」です.. それよりも,「場は電荷や電流に比例する」とか「距離の2乗に反比例する」といった「関数の形」こそが重要です..

2
55
437
中学校で習う 「オームの法則」"V = R・I" は,「離れた2地点間の電位差 "V"」や 「まとまった領域全体の抵抗 "R"」を使った「マクロな表現」です.. 一方で,空間中の1点におけるミクロな現象を表しているのが「微分形のオームの法則」"𝑬(𝒓) = 𝜌(𝒓)・𝒊(𝒓)" です.両方使いこなせると便利です.

2
55
425
「トランジスタだけで作るオーディオ・アンプ」や「トランジスタだけで作るFMラジオ」,「トランジスタだけで作るCPU」などを作ってきましたが,こういうのは回路の中身がすべて見えるので好きです.. しかし,数式を使ったある程度厳密な設計方法をわかりやすく解説している入門書は少ない印象です.



2
77
418
大学の工学部で習う数学の構造を大雑把にイメージしてみます.. とにかく「ベクトル解析」と「フーリエ解析」を押さえれば,大抵のことに対応できます.これをモチベーションとして微分・積分と線形代数を学び始めると,全体の見通しが良くなります..

1
75
419
われわれが電子回路やロボットの設計をする時の唯一のよりどころは「微分方程式」ですが,これを離散化した「差分方程式」のほうが直感的にわかりやすいかもしれません.. 要は「"変化" の情報を積み上げていけば何ステップも先の未来を予測できる」という話で,これが「設計」という作業の本質です.

1
73
417
電子回路を作りたい → 物理を知らないと設計できない → 物理を学ぶには数学が必要 → 数学や物理の教材・キットを売りたい → 通販サイトも自作する. という流れで今に至っているので,うちの商品の幅はこんな感じになっています.1つ1つの商品は,本質を理解できるように丁寧に作っています.

0
44
421
「ストラング 線形代数イントロダクション」は,MITの教授によって書かれた名著です.. その中に「電子技術者が信号に関してなすべき最初のことは,そのフーリエ変換を行うことである」という一節があります.語気が強い.. 技術者のための本質を学ぶ数学3 フーリエ解析.

1
52
421
エンジニアリングの現場で使う数学は,普通の数(スカラ)よりもベクトルを扱うことの方が多い気がします.応用上は「ベクトルの微分」や「無限次元のベクトル」など色々な話が出てきます.. まずは,基本中の基本である「内積」と「外積」を押さえたいところです.

1
88
404
アナログ回路が好きです.電源ONと同時に電圧が大きい場所から小さい場所へ電流が流れ,一連の物理現象が「からくり」の機構のように連鎖していく.その結果として,何らかの意味を持つ「アナログ信号処理」が達成される.. 「自然現象と直接向き合っている」という感触を得られるところが楽しいです.

2
43
398
自分は電気系なのでフーリエ,ラプラス,z変換という「周波数軸」で考える習慣が染みついていましたが,カルマン・フィルタの基礎である現代制御理論は「時間軸」の理論で,初めて見たときはショックを受けました.. それを克服(?)して完成したのがこの倒立振子です..
1
63
402
「フーリエ解析」を学べば,すべて系統的に理解できます..●リアルタイム信号処理における「FFT」や「z変換」.●制御理論における「ボード線図」や「位相余裕」.●電子回路における「インピーダンス」. 技術者のための本質を学ぶ数学3 フーリエ解析.

1
39
407
1738個のトランジスタをはんだ付けして作る『フルディスクリートCPUキット』好評発売中です.残り在庫は5個です.. この動画では割り算 「9 ÷ 2 = 4 あまり 1」 を計算しています.すべての信号線にLEDが付いているので,計算中のCPUの動作を目で見て確認できます..
3
115
398
この「CPU自作キット」では7,000個の部品をはんだ付けする必要がありますが,今回の「FMラジオ・キット」で使っている部品は180個です.. 1/40の労力です.楽勝ですね(感覚がバグっている)..
1
196
391
小型ACアダプタ(スイッチング電源)のノイズを除去するために,エミッタ・フォロア型のノイズ・フィルタを作ってみます.. 簡単な回路ですが,GNDのインピーダンスを小さくするためにベタ基板を使います.トランジスタは必要な電流に合わせて適当に選びます(今回は100mA~200mAを想定).

2
65
385
半導体デバイスを理解する上で避けて通れない「ショックレーのダイオード方程式」ですが,この式には「温度」"T" が含まれています.. しかし,回路理論や制御システム理論,力学,電磁気学,量子力学など電気系で習う分野には基本的に温度 "T" が出てきません.温度 "T" は疎遠な物理量なのです.

6
80
374
エンジニアとして色々な物を「設計」したいなら理論を学ぶのがトータルでは「楽」なのですが,その習得には「壁」があるのも事実です.. 具体的に作りたい物があったとして,それを叶えるために必要な理論を探し,学び,理解し,現場に適用するといったステップを意識するのが重要かと思います.

1
94
379
「株式の統計学」という本を入手しました.すでに統計学を学習したことがある人を対象として,金融商品の分析手法を解説した本です.うちのセミナで扱っている主成分分析やカルマン・フィルタも登場します.. この本をネタとして「数学を学んでおくと得をする」という話を書いてみようかと思います.

2
47
381
電子回路設計では「インピーダンス」という便利な道具がありますが,これを物理現象の本質だとか基本原理だと思い込んでいる方を見かけます.どちらかというと,インピーダンスは「チート技」の類です.. 回路設計のよりどころは「微分方程式」で,大抵は「マクスウェル方程式」に由来しています.

2
85
376
回路設計,古典制御,ディジタル信号処理などを理解する決定的なポイントは "exp(j𝜔t)" (複素正弦波)を扱えるか否かです.ここに到達するまでのチェック・ポイントをまとめてみました..「加法定理」や「sinの微分」を面倒くさがらず自分で証明できるようにしておくと一気に道が開ける気がします.

1
106
375
電磁気学や流体力学でお世話になる「ベクトル解析」では3種類の微分演算を使います.. ●勾配: 各方向への偏微分.「面の傾き」のイメージ..●発散: 微小体積の表面における面積分.「湧き出し量」のイメージ..●回転: 微小面積の外周における線積分.「回転量」のイメージ.

1
55
374
『(ディジタル)無線の技術を学ぶのに良い文献はありますか?』という質問をいただきました.. 歴史的に見ると無線技術というのは電気・電子工学の集大成であり,「理論の地図」に示したほぼ全ての項目が必要となります.これを1冊で網羅するのは非常に困難だと思います..

1
74
365
物を設計したいなら「微分・積分」と「フーリエ解析」をセットで学ぶのがおすすめです.. ●世の中の自然現象(ロボットや電子回路なども含む)は「微分方程式」で表される.●「フーリエ解析」を使えば微分方程式から「微分を消す」ことができる(ただの方程式に帰着する).

3
62
363
電子回路の設計で必ず使う「電圧」ですが,「電圧とは何か?」という話を正しく理解するのは意外と大変かもしれません.. 「電圧」が便利なものであることは間違いありません.できればその背景や成り立ちまで含めて理解しておきたいところです.

2
52
360