
IEEE Transactions on Robotics (T-RO)
@IeeeTro
Followers
1K
Following
4
Statuses
234
Reporting major advances in the state-of-the-art in all areas of robotics.
Joined December 2022
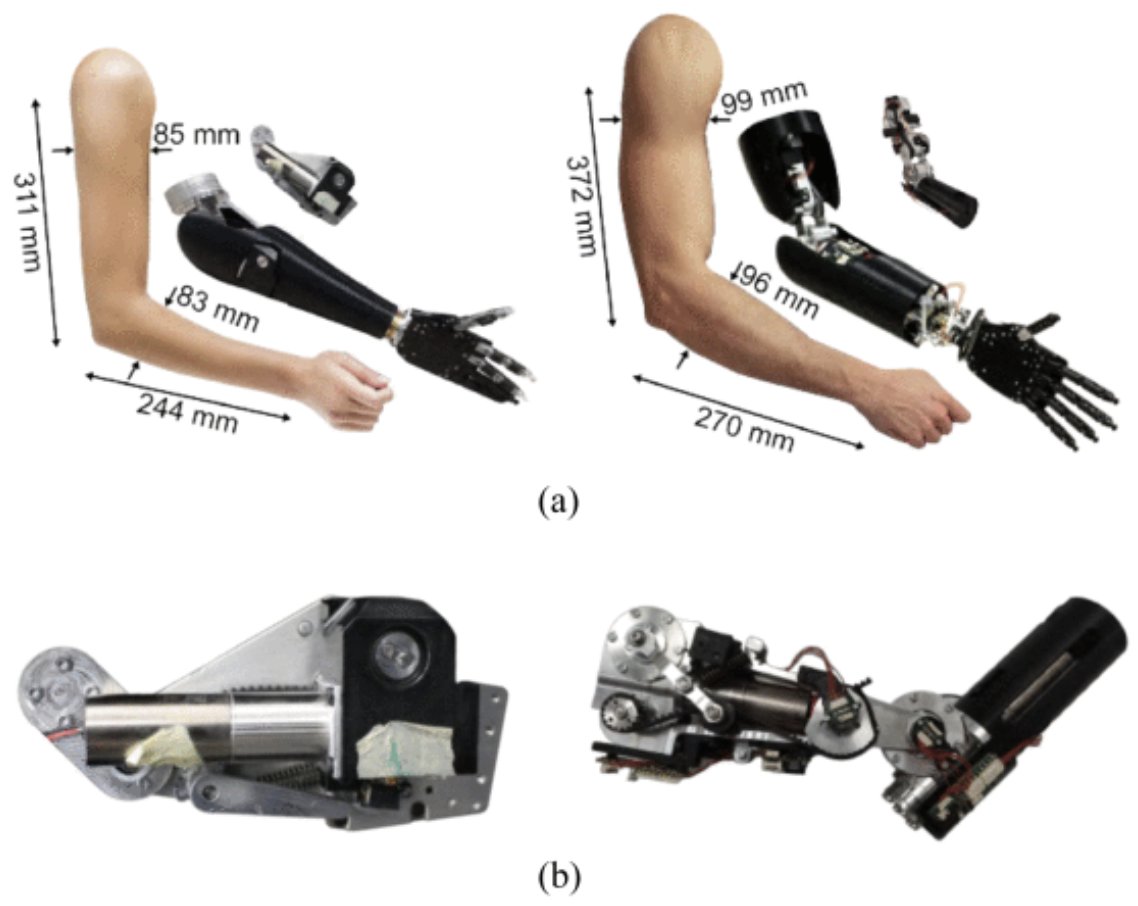
A recent T-RO paper presents a Variable Stiffness elbow #prosthesis that caters to diverse user needs and varying residual limb morphologies. #VariableStiffnessActuators #ElbowProsthetics #prosthetics #softrobotics
@AntonioBicchi
0
0
4
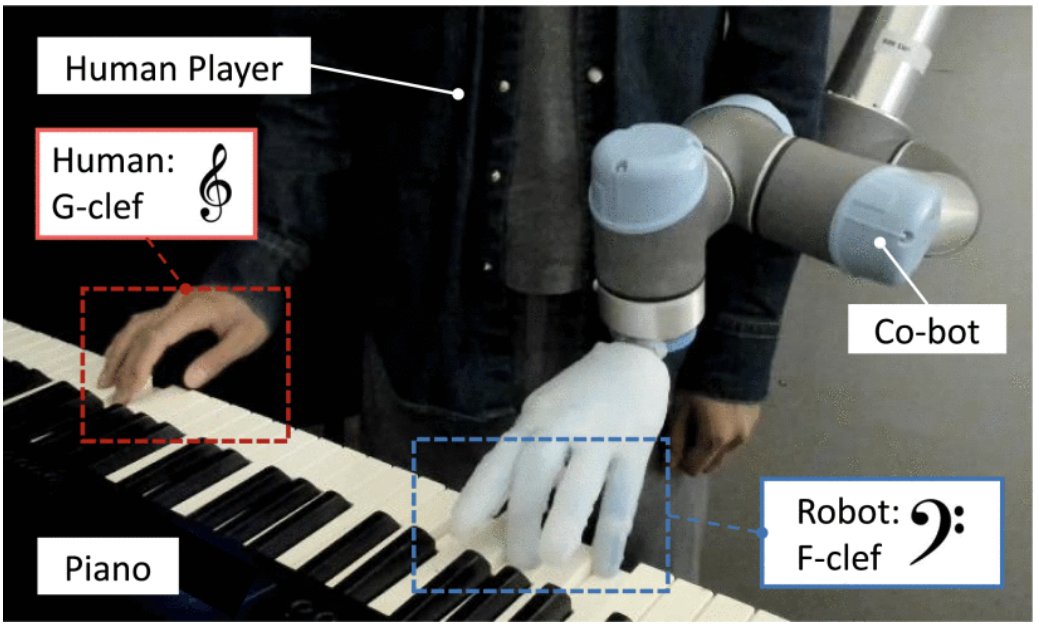
Researchers from @Cambridge_Uni develop a robot for human-robot piano collaboration, using real-time music accompaniment and non-verbal cues for seamless synchronization in a new T-RO paper 🎹🤖 #AI #HumanRobotInteraction #MusicRobotics #PianoPlayingRobot
0
1
15
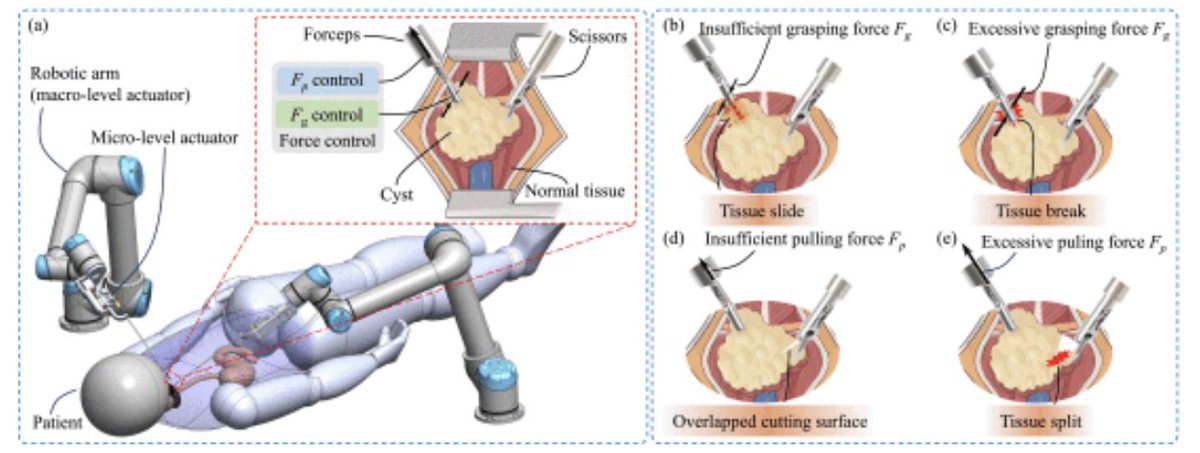
Utilizing innovative miniature sensorized forceps, a recent T-RO paper introduces a novel method to control multiple forces and automate tissue traction. #SurgicalRobots #AutomaticTissueTraction #RobotSensingSystems #MinimallyInvasiveSurgery @UNSW
0
0
2
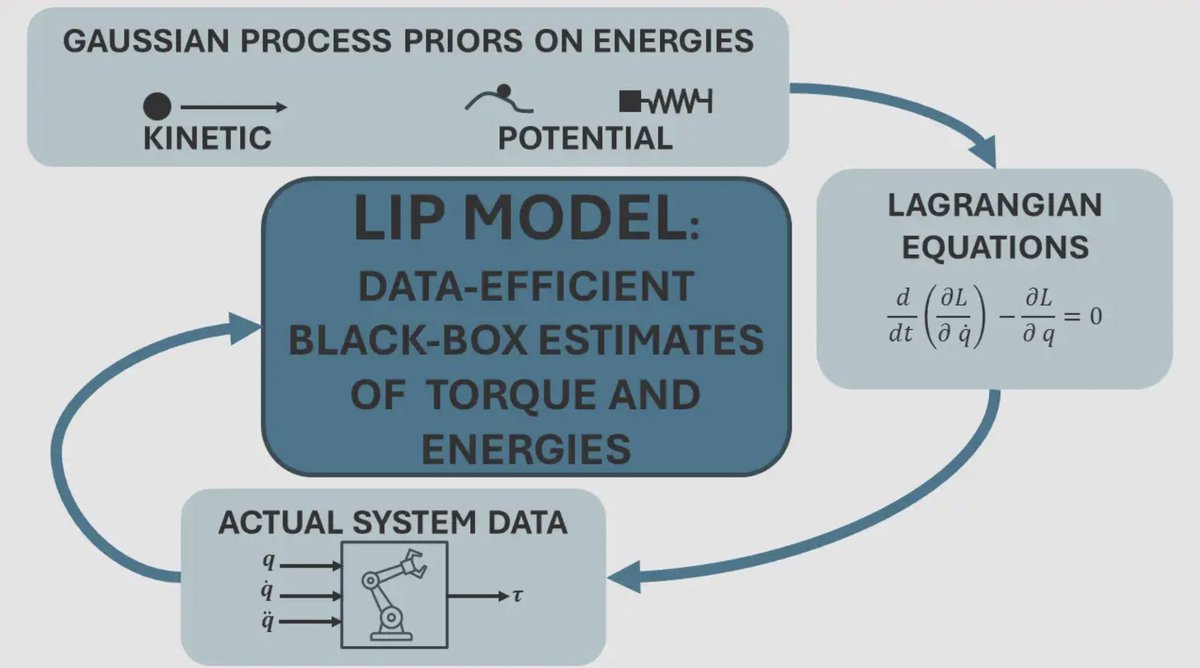
This T-RO paper uses a Lagrangian Inspired Polynomial kernel to perform #GaussianProcess (GP) regression for the identification of the #InverseDynamics of robotic manipulators. 🤖. #KineticEnergy #PotentialEnergy @RomeresDiego
0
1
9
Researchers from @UofT perform extensive elastic #StabilityAnalysis of tendon driven continuum robots showing the existence of multiple robot configurations with different shapes, achievable with the same actuation inputs. #ContinuumRobots #Kinematics
0
1
9
T-RO is excited to announce the newest members to our editorial board, including: @ShoaibEhsan8, @KasraKhosoussi, Jongwoo Kim, @JiachenLi8, Xiang Li, Wei Pan, @MatteoSaveriano, Chaoyang Song, and Christos Verginis

2
1
13
Researchers from @ASUEngineering develop a new algorithm for human robot interaction that relies upon efficiently solving complex partial differential equations using a novel hybrid learning approach. #NeuralNetworks #HumanRobotInteraction #robots
0
1
3
Are you wondering about what the limits of SLAM are? Check out this recent T-RO paper that describes the performance of #SLAM in Extreme Environments during the DARPA SubT Challenge. #AutonomousRobots #MultiRobotSystems @lucacarlone1

0
6
16
Last call! Submissions for the new Visual SLAM special collection deadline is January 15. Thank you to @jcivera, @giov_cioffi, @davsca1, @StefanLeuteneg1, Abhinav Valada, Teresa Vidal-Calleja, and @ghuangud for handling the collection. #GaussianSplatting

0
2
2
Calling for papers for the Event-based Vision for Robotics special collection. Submissions begin January 1. Thank you to @SvenBehnke, Friedrich Fraundorfer, Guillermo Gallego, Fabio Morbidi, and Pascal Vasseur for handling the collection. #RobotVision

0
0
6
In a recent T-RO paper, researchers from @UniTurku and @TurkuAMK present a novel controller to jointly optimize the energy consumption of a wheeled robot. #EnerygOptimization #WheeledRobots

0
2
5
T-RO Special Collection #ImpactAwareRobotics is live! A special thank you to Abderrahmane Kheddar, @YanGuRobotics, @MichaelAPosa, @AleSaccon, and handling editor Paolo Robuffo Giordano for their tireless commitment. #LeggedRobots #RobotSensingSystems
0
15
55
DEADLINE EXTENDED to January 15 for submissions to the #VisualSLAM special collection. Thank you to @jcivera, @giov_cioffi, @davsca1, @StefanLeuteneg1, Abhinav Valada, Teresa Vidal-Calleja, and @ghuangud for handling the collection. #GaussianSplatting

1
1
11
A recent T-RO paper from researchers @HIT_China describes a novel water #JumpingRobot whose performance is optimized by constructing an accurate model of the interaction force between the robot and the water surface. #LeggedLocomotion #HydrodynamicModel

0
0
5
RT @Somayeh_HS: Absolutely thrilled to see our research accepted to @IeeeTro!! 🎉🎉🎉 A big thank you to my supervisors, @maththrills and @Tob…
0
2
0
Researchers from @SMU describe how to control heterogeneous magentic millirobots using a single global magnetic field. #magnetosphere #LeggedLocomotion #PathPlanning #millirobot

0
0
0
A recent T-RO paper from researchers @UniversityLeeds describes how to perform robotic manipulation of 3-D soft objects using 3-D surface feedback #RobotKinematics #RoboticManipulationofSoftObjects #3DSoftRobots

0
0
7
Researchers from @SeoulNatlUni develop a UAV with a bioinspired passive dynamic foot in which the claws are actuated solely by the impact energy in a recent T-RO paper. #AutonomousAerialVehicles #AerialSystems #UnderactuatedRobots
0
0
2
Researchers from @USC leverage Hamilton-Jacobi reachability to co-optimize safety without sacrificing performance in #AutonomousSystems, making them more reliable and efficient for real-world applications. #HamiltonJacobiReachability

0
0
5